Distributed output feedback asymptotic consistency control method for multi-agent hysteresis system
A multi-agent system, output feedback technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the dynamic surface asymptotic consistency control problem that cannot be solved in high-order nonlinear multi-agent systems and other problems to achieve the effect of achieving asymptotic convergence, ensuring stability, and eliminating the impact of system tracking performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
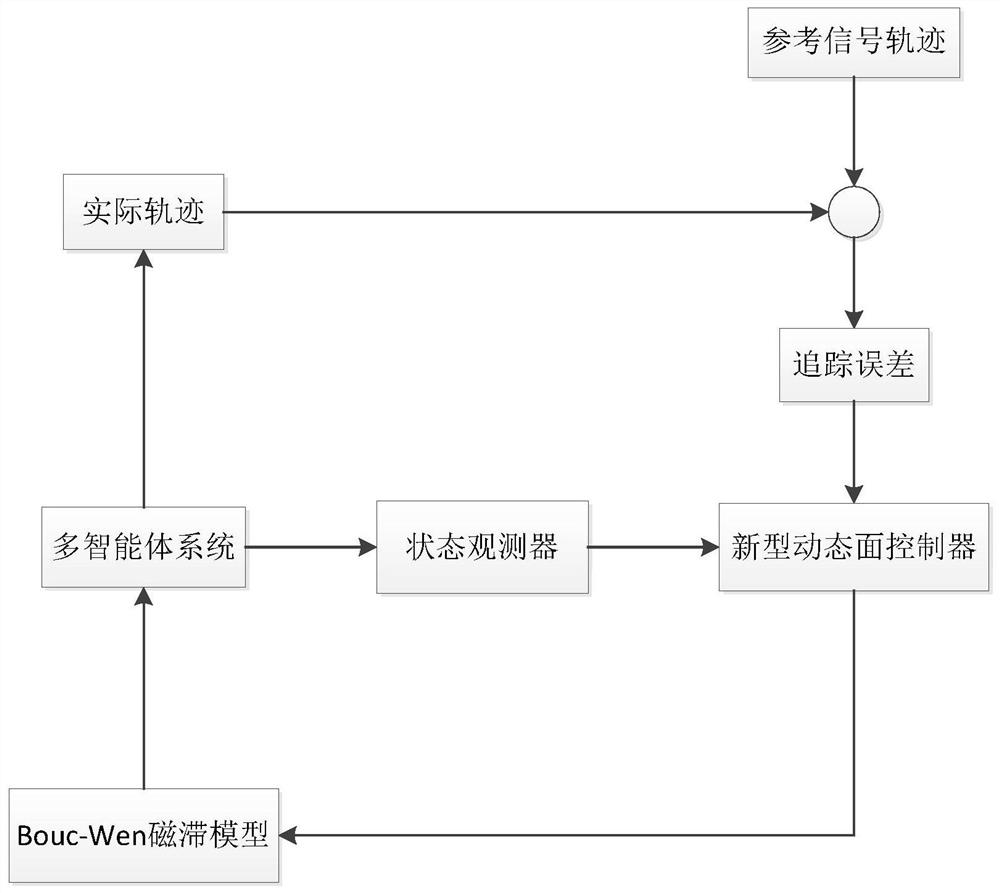
[0167] A distributed output feedback asymptotically consistent control method for a multi-agent hysteresis system, applied to electronic equipment, the steps are as follows (the flow chart is as follows figure 2 shown):
[0168] (1) Obtain the reference signal trajectory and the actual response trajectory of each follower subsystem in the multi-agent system in real time, and track the consistency error between the reference signal trajectory and the actual trajectory in real time;
[0169] (2) Input the consistency error between the reference signal trajectory and the actual trajectory into the dynamic surface controller to process the derivative of the virtual control rate. The dynamic surface controller contains a nonlinear filter, and the mathematical model of the nonlinear filter is as follows:
[0170]
[0171]
[0172]
[0173]
[0174] Where: 1≤i≤N, 1≤j≤ρ i , α i,j and are the virtual control rates of the i-th follower subsystem before and after step j ...
Embodiment 2
[0213] An electronic device, including one or more processors, one or more memories, one or more programs, and an information acquisition device for acquiring reference signal trajectories and actual trajectories of a multi-agent system;
[0214] One or more programs are stored in the memory, and when the one or more programs are executed by the processor, the electronic device executes a kind of multi-agent hysteresis system distributed output feedback asymptotically consistent control as described in Embodiment 1 method.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More