

Pedestrian trajectory prediction method based on multi-subdivision feature control
A trajectory prediction and feature control technology, applied in the fields of automatic driving and computer vision, can solve the problems of insufficient features, indistinguishable degree of trajectory prediction influence, single form of trajectory prediction generation process, etc., to achieve high prediction accuracy and strong interpretability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0104] Design principles of the invention
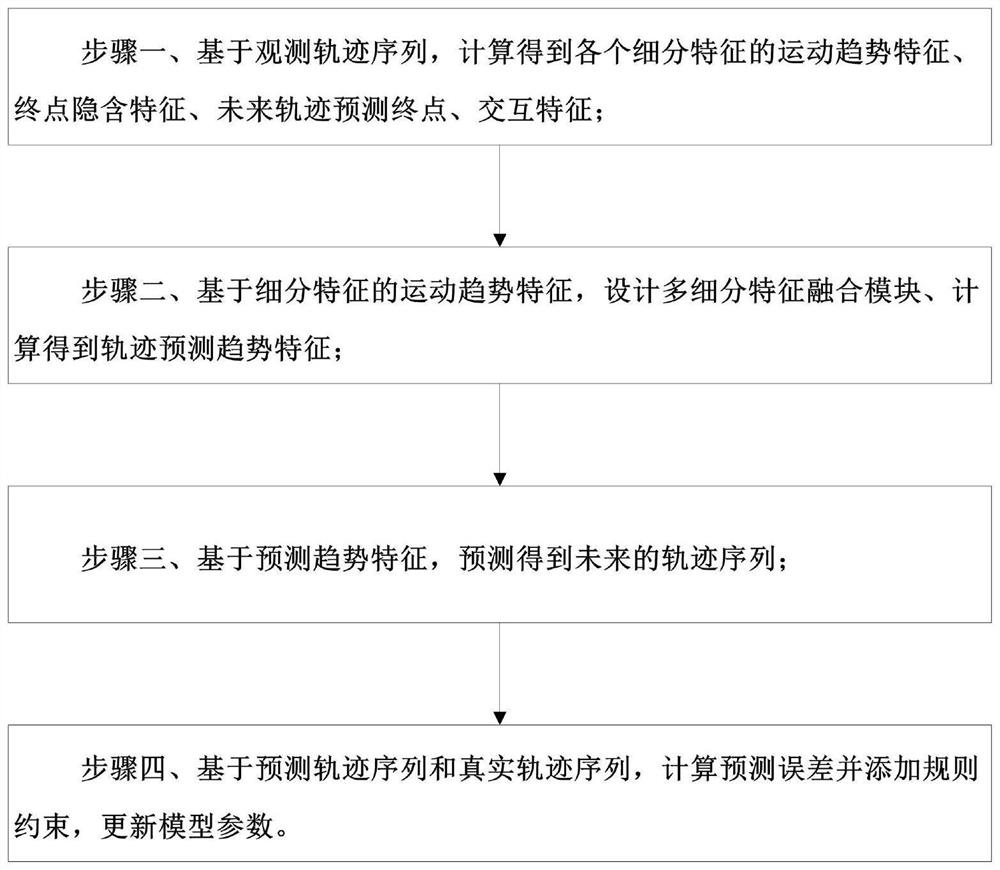
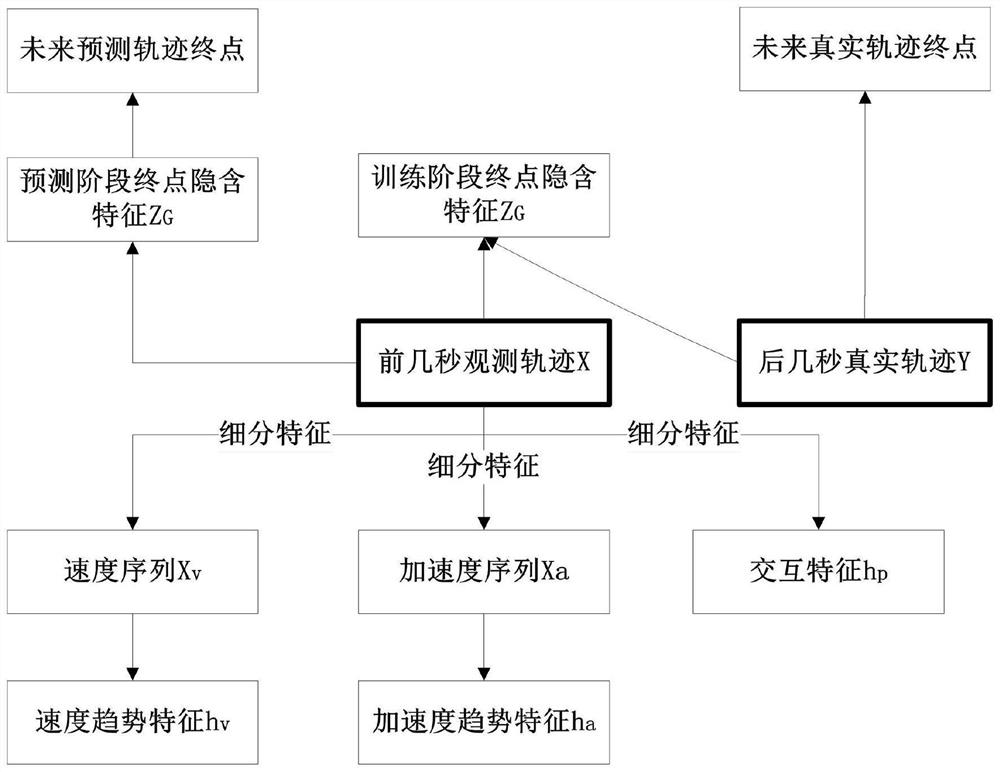
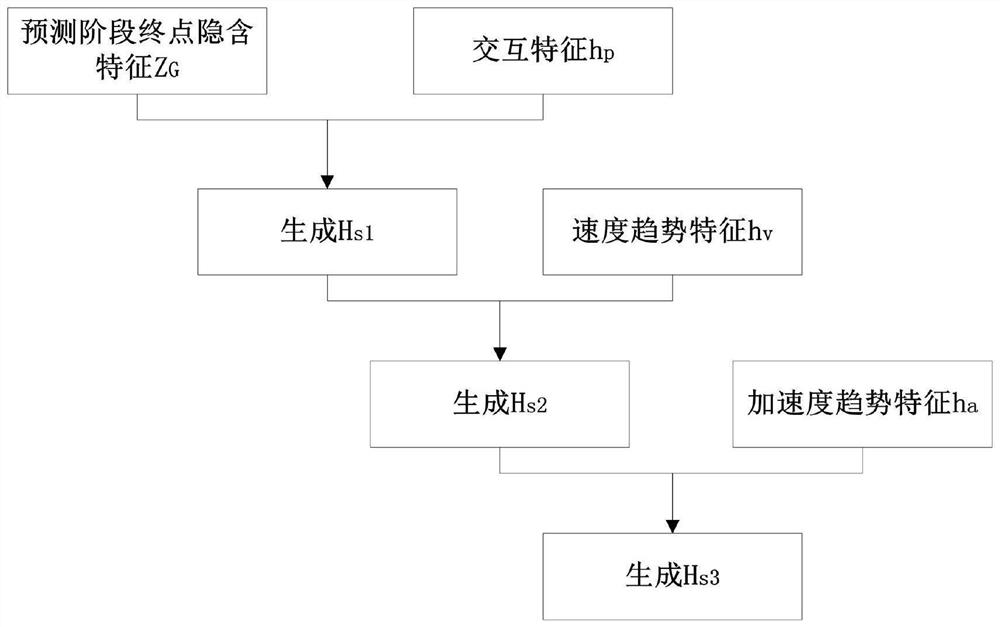
[0105] 1, the network and the pedestrian against the relationships generated trajectory prediction method of the present invention. Pedestrian trajectory prediction method of the present invention is implemented on a network infrastructure generated against the network. 1) against the generation network architecture consists of two parts: one is called the generator for generating the next pedestrian trajectories: the n seconds before the current scene observed pedestrian track, into the generator, the generator generates the next m second trajectory position, function is to predict the current scene around the vehicle is within a certain range. Wherein n and m are values for the scene to be determined and the data acquisition frequency, e.g., urban scene, the case where the data acquisition frequency 25Hz, n is preferably 1 ~ 2, m preferably 3-5. Another is the arbiter: discriminator for future trajectory generator generates the scoring...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More