

Multi-unmanned aerial vehicle game collaborative search method based on perception-locking-discovery
A technology of multiple drones and search methods, applied in non-electric variable control, instruments, control/regulation systems, etc., can solve problems such as low efficiency and poor robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0064] In order to achieve more effective search and reduce the uncertainty of the environment, the present invention uses methods such as large-value probability map fusion and potential energy game to achieve the optimal overall efficiency of multi-UAV collaborative search, and adopts the following technical solutions:
[0065] Multi-UAV game collaborative search method based on perception-lock-discovery:
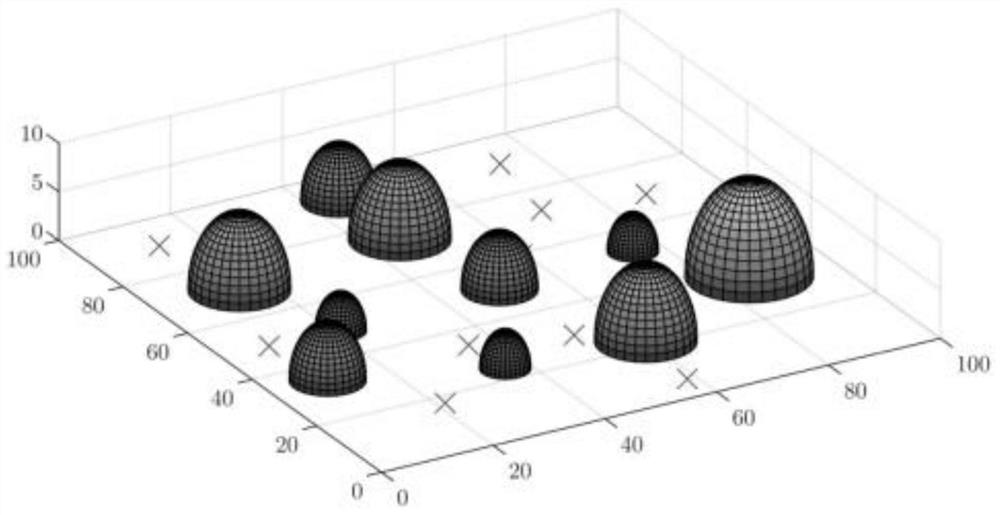
[0066] (1) Multi-UAV collaborative search environment and flight state modeling
[0067] Search for unknown environments Divide the environment equally into L x × L y Units of the same size, each unit g is identified by (x, y).
[0068] mission drones tagged as Use (x n ,y n , h n ) logo, where h n ∈[h min , h max ]; h min , h max are the minimum and maximum flight altitudes of the UAV, respectively.
[0069] Targets to search for are marked as Use (x t ,y t ) logo, which is located on the ground with a height of 0, as long as the target position fall...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More