

Base station autonomous cooperative deployment method based on UAV swarm in unknown indoor environment
An indoor environment and unmanned aerial vehicle technology, applied in wireless communication, radio transmission system, measuring distance, etc., to achieve the effect of improving real-time positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0033] In order to make the object of the present invention, the technical solution and advantages more clearly understood, the following in conjunction with the accompanying drawings and embodiments, the present invention will be further elaborated in detail. It should be understood that the specific embodiments described herein are only used to explain the present invention and are not intended to qualify the present invention.
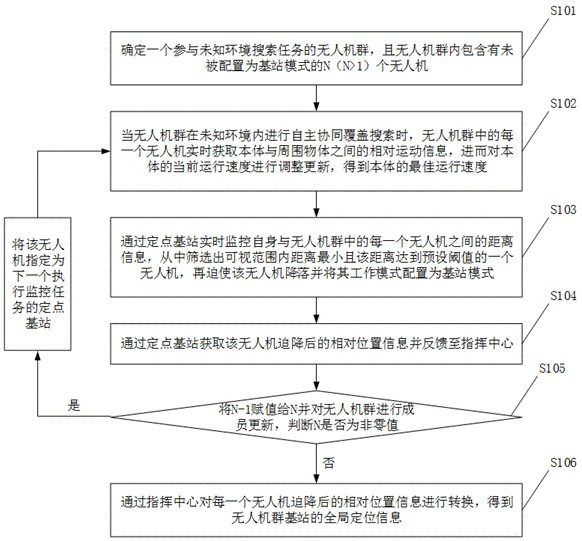
[0034] It should be noted that although the functional modules are divided in the system diagram, the logical order is shown in the flowchart, but in some cases, the steps shown or described may be performed in a different order from the modules in the system, or in the flowchart. Descriptions and claims and the above-mentioned drawings in the terms "first", "second", etc. are used to distinguish similar objects, and do not have to be used to describe a particular order or sequencing.
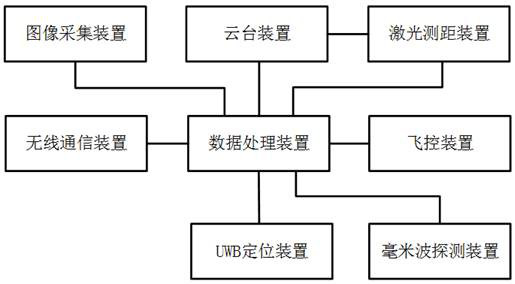
[0035] Please refer to Figure 1 , Figure 1 Schematic diagram of the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More