Dam face detection underwater robot system based on collaborative operation of multiple acoustic devices
A robot system and underwater robot technology, applied in the field of underwater structure detection underwater robot system, can solve the problems of complex underwater environment, long service life, low detection efficiency and the like
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
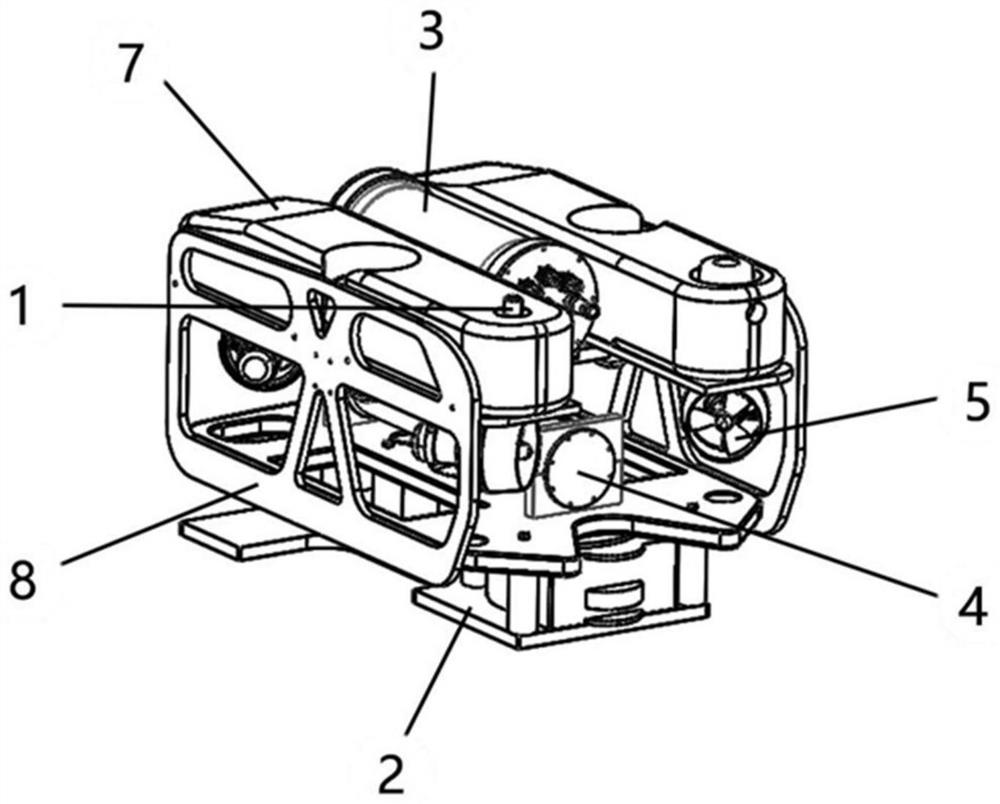
[0040] Such as figure 1 As shown, a dam surface detection underwater robot system based on multi-acoustic equipment cooperative operation of the present invention includes a main control cabin 3, a battery cabin 4 connected to the main control cabin 3, and an underwater robot installed on the buoyancy panel 7 of the underwater robot. Acoustic positioning and sounding device 1, the underwater propeller 5 installed in the main control cabin 3 and the battery cabin 4, the underwater robot body frame 8 connecting the main control cabin 3 and the battery cabin 4, and the underwater robot body frame 8 The underwater acoustic detection equipment 2, wherein the battery compartment 4 is provided with an energy storage module, wherein the energy storage module is a battery pack.
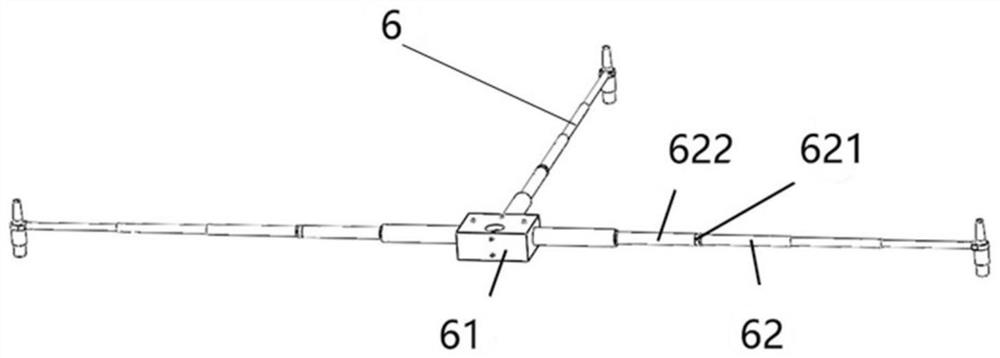
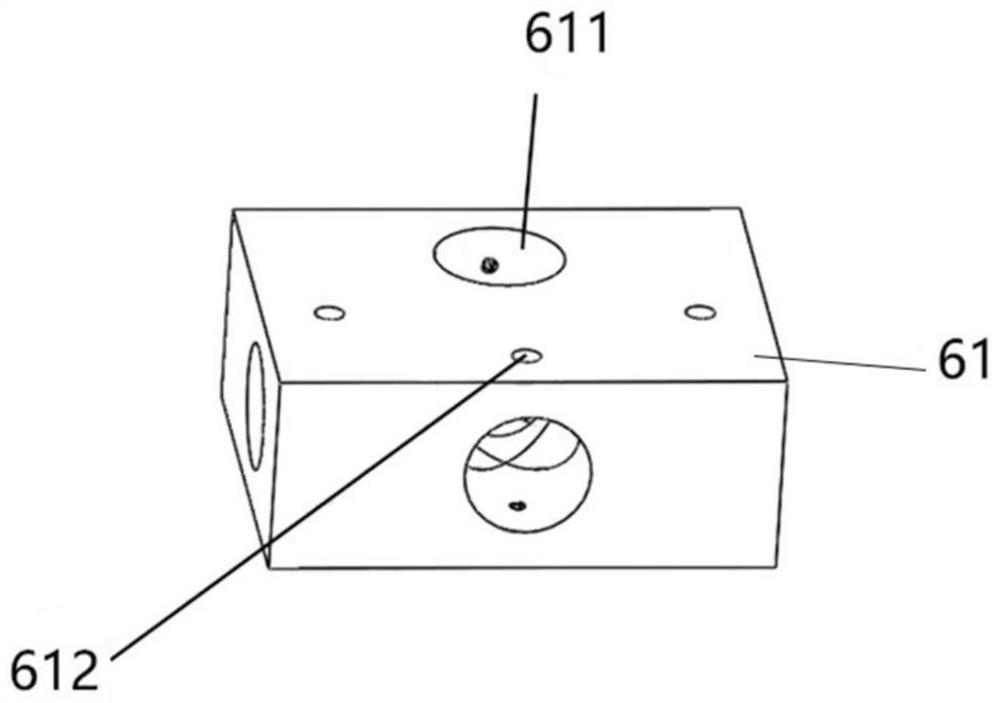
[0041] Such as figure 2 As shown, the underwater acoustic positioning and soun...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More