

Sterile isolation device for laparoscopic surgery robot and laparoscopic surgery robot thereof
A technology of surgical robot and isolation device, which is applied in the field of absolute aseptic isolation device and laparoscopic surgical robot, can solve the problems of low safety, increased load of driving motor, and less than absolute sealing of device, so as to avoid Interference, realize the effect of rotating seal, and improve safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
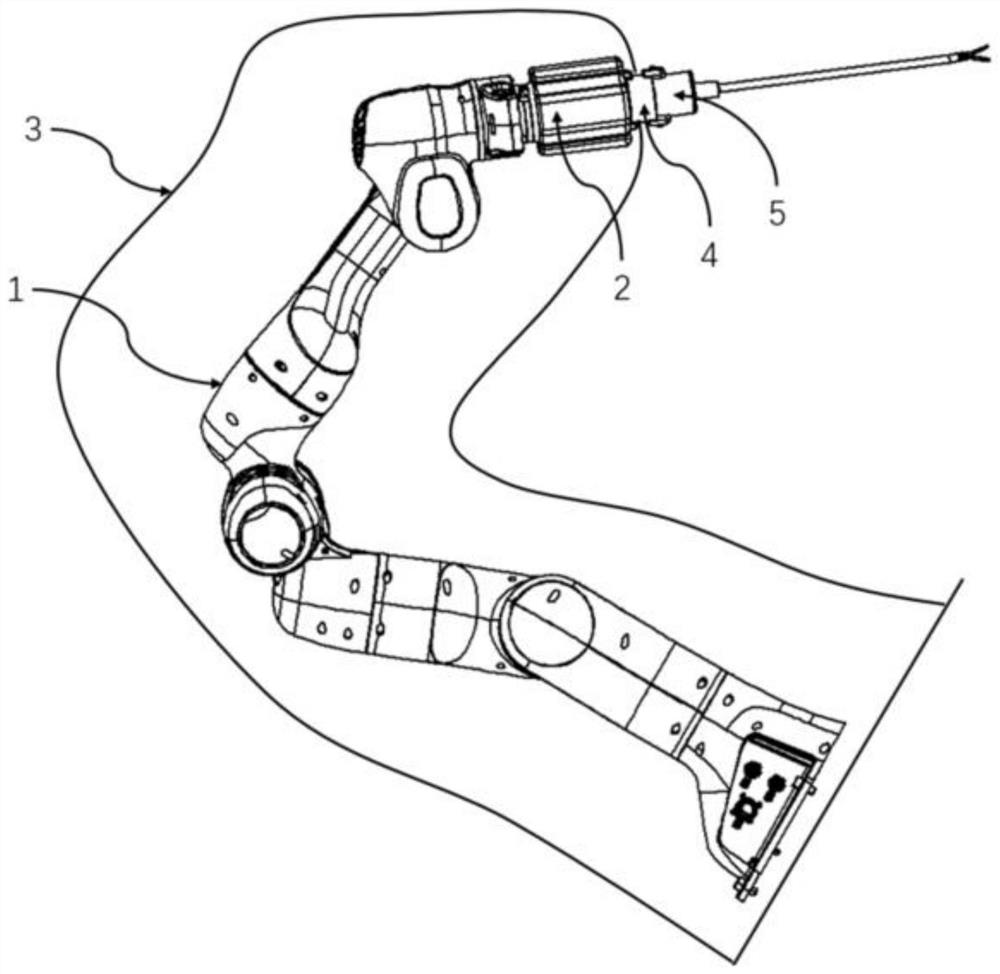
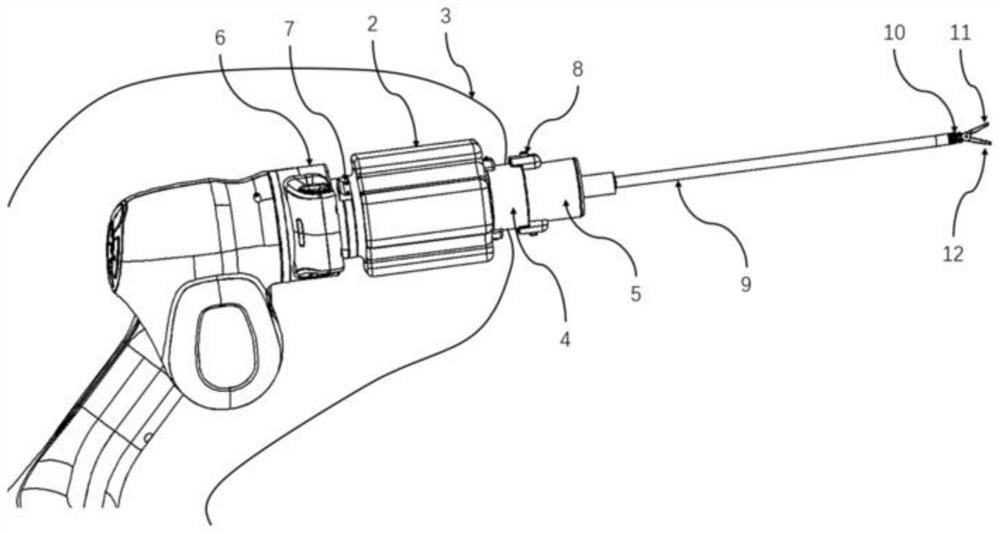
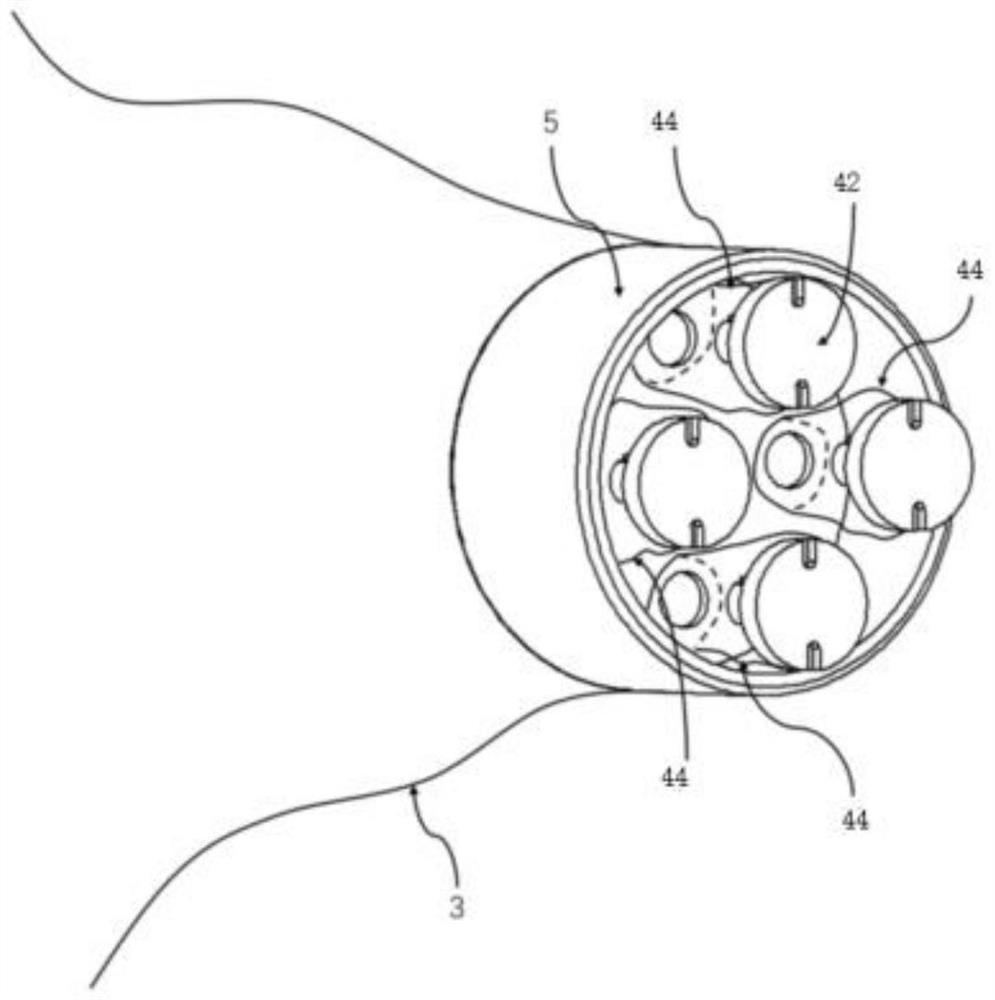
[0029] The present invention provides a sterile isolation device for a laparoscopic surgical robot, such as Figure 1-7 As shown, it includes robot arm 1, actuator arm 2, non-elastic transparent film 3, connector 4, instrument 5, seventh axis 6 and seventh axis flange quick-change switch 7. Actuator arm 2 is fastened through the seventh axis flange The change switch 7 is connected to the seventh axis 6 of the robot arm 1, the connector 4 is connected to the actuator arm 2 through the connector quick-change switch 41, and the instrument 5 is connected to the connector 4 through the instrument quick-change switch 8, which is inelastic and transparent. One end of the film 3 is sleeved on the robot arm 1 , and the other end of the inelastic transparent film 3 is bonded to the connector 4 , so that the robot arm 1 , the actuator arm 2 and some connectors 4 are sleeved inside the inelastic transparent film 3 .
[0030] The operating rod 9 is connected to the instrument 5 , and the o...
Embodiment 2
[0039] The present invention also provides a laparoscopic surgical robot, including a sterile isolation device for the laparoscopic surgical robot.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More