

Vehicle curve control compensation method, device, equipment and medium
A compensation method and vehicle technology, applied in the direction of control devices, etc., can solve the problems of vehicle understeer, imbalance, etc., and achieve the effect of avoiding understeer or imbalance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Example Embodiment
[0058]下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
[0059]附图中所示的流程图仅是示例说明,不是必须包括所有的内容和操作 / 步骤,也不是必须按所描述的顺序执行。例如,有的操作 / 步骤还可以分解、组合或部分合并,因此实际执行的顺序有可能根据实际情况改变。
[0060]本申请实施例提供一种车辆弯道控制补偿方法、装置、计算机设备及计算机可读存储介质。其中,该车辆弯道控制补偿方法可应用于计算机设备中,该计算机设备可以是车载电脑等电子设备。
[0061]下面结合附图,对本申请的一些实施方式作详细说明。在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。
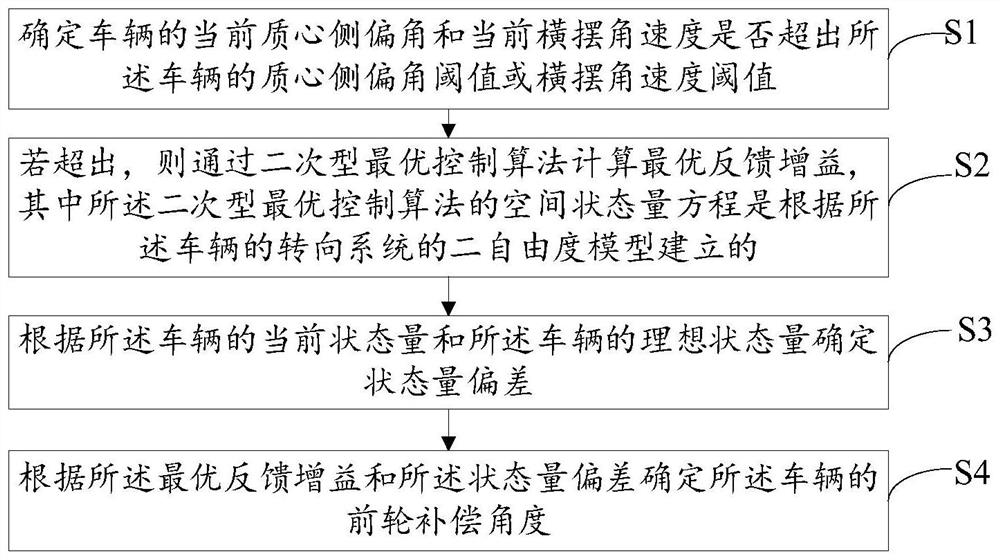
[0062]请参照图1,图1为本申请的实施例提供的一种车辆弯道控制补偿方法的流程示意图。
[0063]如图1所示,该方法包括步骤S1至步骤S4。
[0064]步骤S1、确定车辆的当前质心侧偏角和当前橫摆角速度是否超出所述车辆的质心侧偏角阈值或橫摆角速度阈值。
[0065]示范性的,假设轮胎侧向力为线性模型,建立车辆转向系统的二自由度模型:
[0066]
[0067]其中,k1为前轮侧偏刚度,k2为后轮侧偏刚度,a为质心到车辆前轴的距离,b为质心到车辆后轴的距离,I为车辆转动惯量,v为车辆横向速度,ωr为当前横摆角速度,β为当前质心侧偏角,m为车辆质量,u为车辆纵向车速,δ为前轮转角。
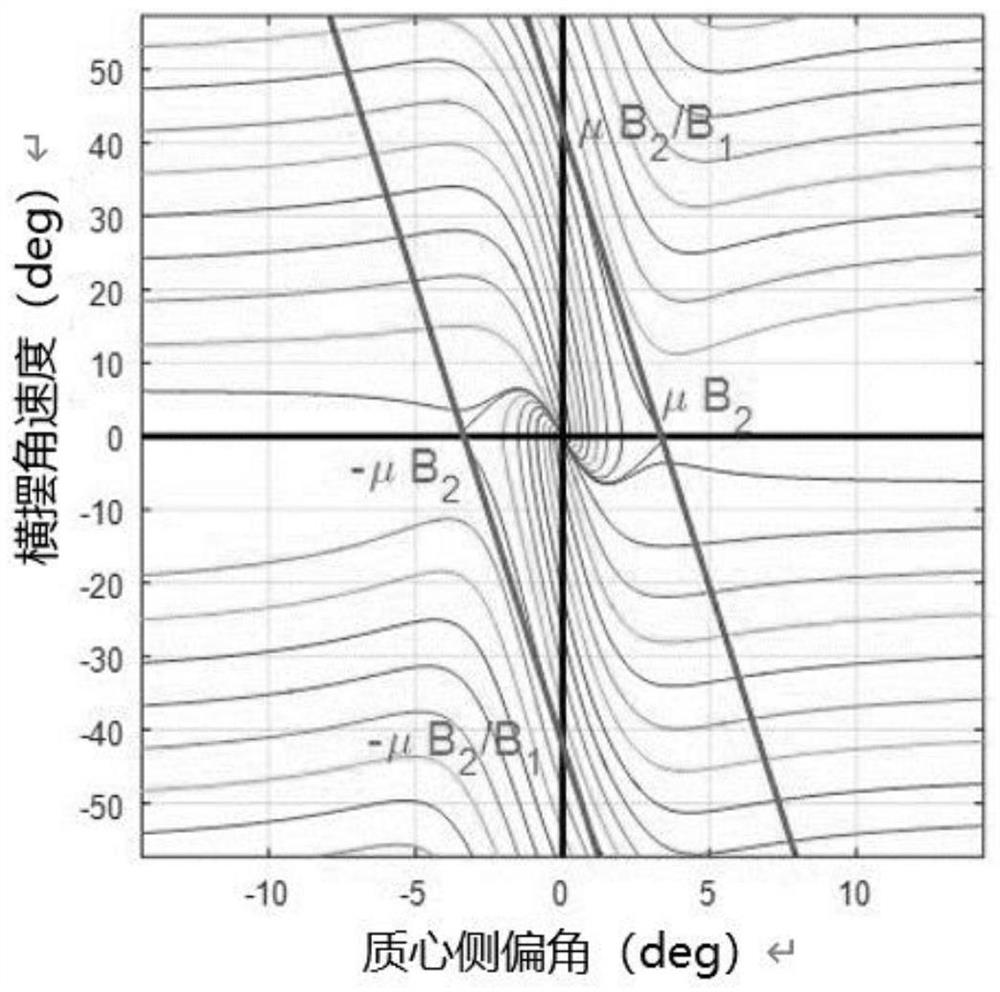
[0068]将前轮侧偏刚度、后轮侧偏刚度、质心到车辆前轴的距离、质心到车辆后轴的距离、车辆转动惯量、车辆纵向车和、车辆横向速度取不同的常量,可以形成不同的曲线,将取不同常量的曲线聚集在一起即可形成如图2所示的相位轨迹图,轨迹相位图体现的是横摆角速度和质心侧偏角之间的关系。
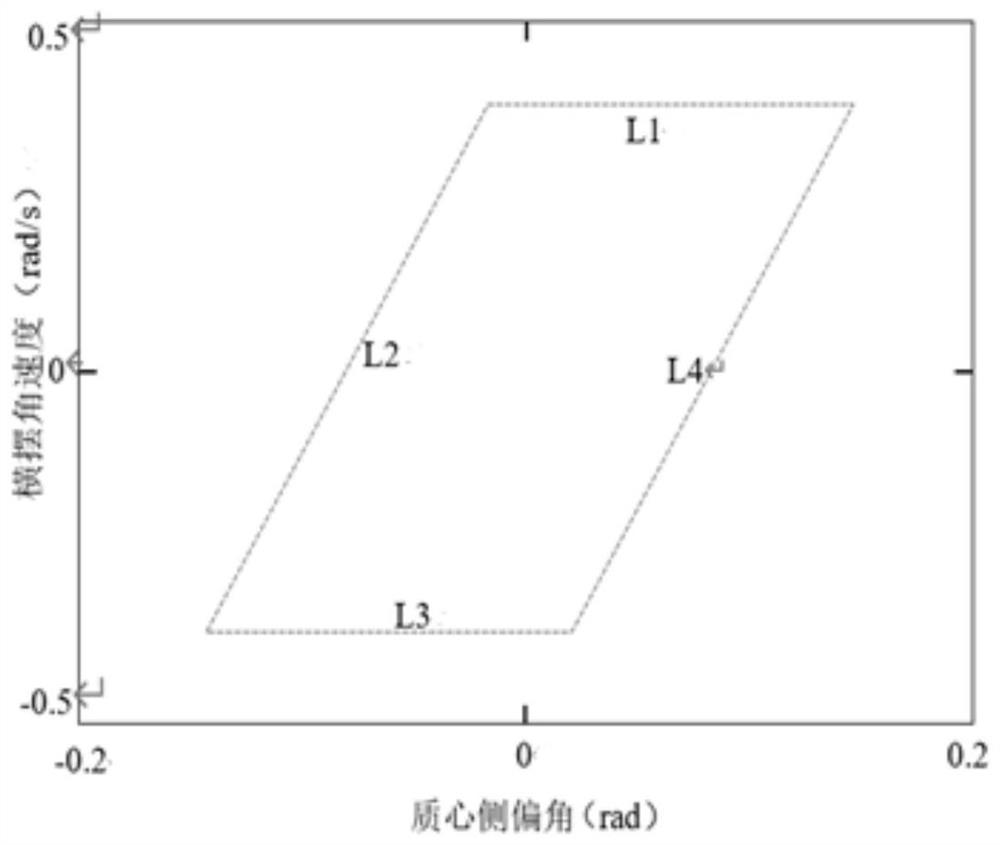
[0069]进一步的,如图3所示,根据轨迹图中的发散区域得到转向稳定性区域。车辆稳定行驶时质心侧偏角在0附近浮动,越小越好,相应横摆角速度形成的区域大致可被平行四边形包络,所以设计设如图3所示的一个平行四边形边界,当在边界内时,车辆是稳定的,当在平行四边形边界外,即可认为车辆不稳定。图3中平行四边形稳定性区域为一个示意图,根据稳定性区域示意图可以确定车辆稳定行驶过程中橫摆...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More