

Unmanned aerial vehicle waypoint jump planning method, system, equipment and medium
An unmanned aerial vehicle, waypoint technology, applied in attitude control and other directions, can solve problems such as poor turning performance and large turning angle, and achieve the effect of shortening turning time, small turning slope, and improving user experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0052] In view of the above technical problems, the embodiments of the present invention provide a method for planning a waypoint jump of an unmanned aerial vehicle. Straight line waypoint or arc waypoint, by configuring the arc waypoint and the straight waypoint at the starting waypoint and the target waypoint to plan the jump route, and use the jump route to achieve smooth turning, the turning slope is small, and the turning trajectory is not easy to generate The overshoot, at the same time, ensures that the unmanned aerial vehicle can exert maximum performance when turning, and also shorten the turning time.
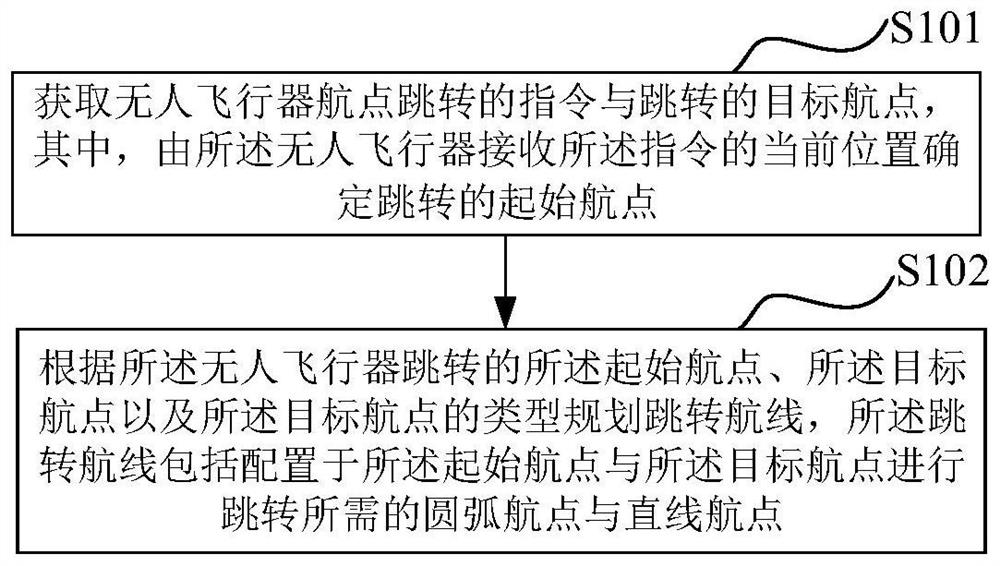
[0053] see figure 1 , the present invention provides a flow chart of an unmanned aerial vehicle waypoint jump planning method, the method comprising:
[0054] Step S101, obtaining the unmanned aerial vehicle waypoint jumping instruction and the jumping target waypoint, wherein the starting waypoint of the jump is determined by the current position of the unmanned aer...
Embodiment 2
[0150] see Image 6 , the present invention also provides a structural block diagram of a UAV waypoint jump planning control device 600, the control device includes a processor, the processor is coupled with a memory, the memory stores program instructions, when the memory The stored program instructions are executed by the processor to achieve:
[0151] The obtaining module 601 is used to obtain the instruction of the UAV waypoint jumping and the target waypoint of the jumping, wherein, the current position where the UAV receives the instruction determines the starting waypoint of the jumping;
[0152] Waypoint jump planning module 602, configured to plan a jump route according to the start waypoint, the target waypoint and the type of the target waypoint to be jumped by the UAV, the jump route includes It is configured at the arc waypoint and the straight line waypoint required for jumping between the starting waypoint and the target waypoint.
[0153] If the type of the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More