

Robot autonomous exploration method and system based on deep learning
A deep learning and robotics technology, applied in the field of robotics, can solve problems such as large boundaries, poor flexibility in map construction, and difficulty in obtaining information, and achieve the effect of increasing speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
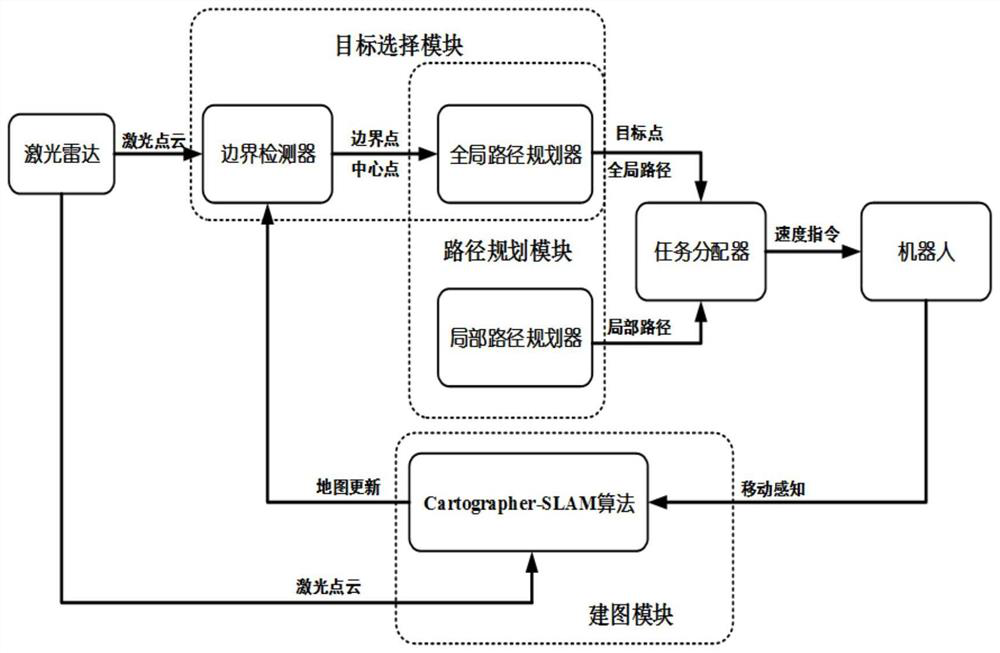
[0049] In order to achieve high-precision indoor scene mapping, a deep learning-based robot autonomous exploration method is disclosed in this embodiment, including:
[0050] Obtain the coordinate points of the robot and the current indoor scene graph constructed;
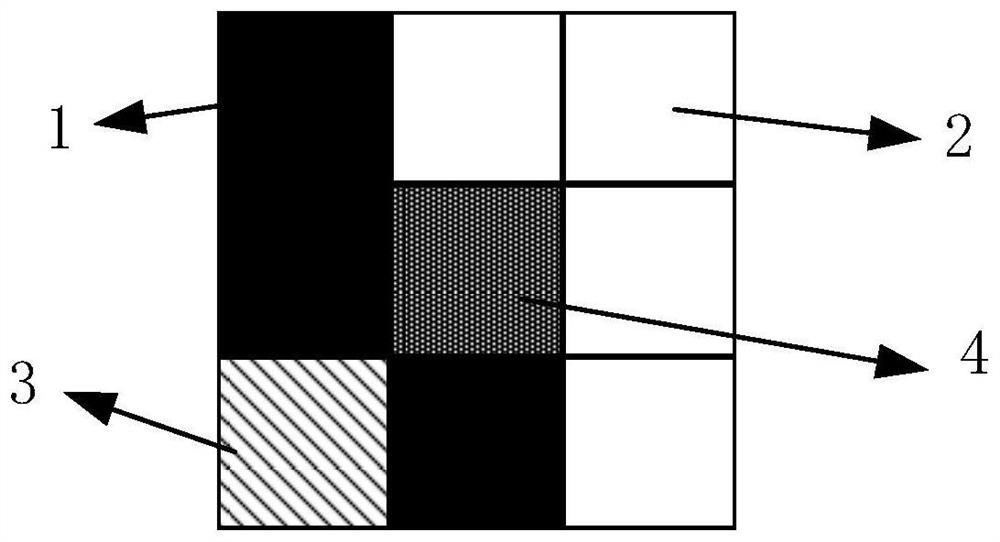
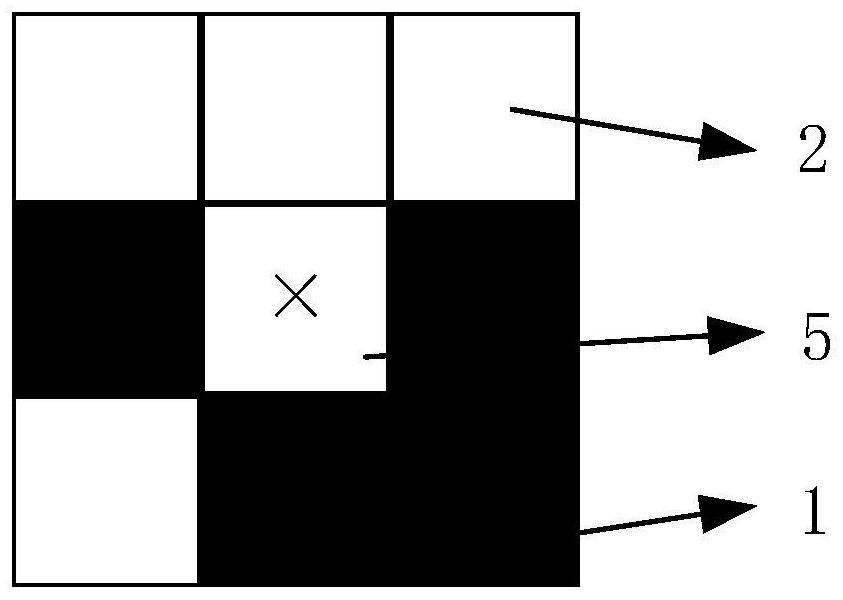
[0051] Determine the boundary of the current indoor scene graph through a deep learning network;
[0052] Select the boundary center closest to the robot coordinate point as the candidate point;
[0053] Generate tree-like paths between robot coordinate points and candidate points through fast growing random tree algorithm;
[0054] Select the penultimate node on the tree path as the target point;
[0055] Generate a global path based on robot coordinate points and target points;
[0056] Drive the robot to move along the global path at a set speed to acquire new laser point cloud data;
[0057] The current indoor scene map is updated through the new laser point cloud data to complete the indoor scene mapping. ...
Embodiment 2
[0111] In this embodiment, a robot autonomous exploration system based on deep learning is disclosed, including:
[0112] The data acquisition module is used to acquire the coordinate points of the robot and the current indoor scene graph constructed;
[0113] The target selection module determines the boundary of the current indoor scene graph through the deep learning network; selects the boundary center closest to the robot coordinate point as the candidate point; generates a tree-like path between the robot coordinate point and the candidate point through the fast growing random tree algorithm; select The penultimate node on the tree path is the target point;
[0114] The path planning module is used to generate a global path according to the robot coordinate points and target points;
[0115] The robot drive module is used to drive the robot to move along the global path at a set speed to obtain new laser point cloud data;
[0116] The mapping module is used to update t...
Embodiment 3
[0118] In this embodiment, an electronic device is disclosed, which includes a memory and a processor, and computer instructions stored in the memory and executed on the processor. When the computer instructions are executed by the processor, the based on Steps described in a deep learning approach to autonomous robotic exploration.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More