

Data-driven unmanned aerial vehicle wind disturbance model online wind disturbance estimation method
A data-driven, unmanned aerial vehicle technology, applied in three-dimensional position/channel control, attitude control, etc., can solve problems such as UAV deviation from the target point, UAV system uncertainty and complexity, and UAV movement influence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be described in detail below with reference to the accompanying drawings and embodiments.
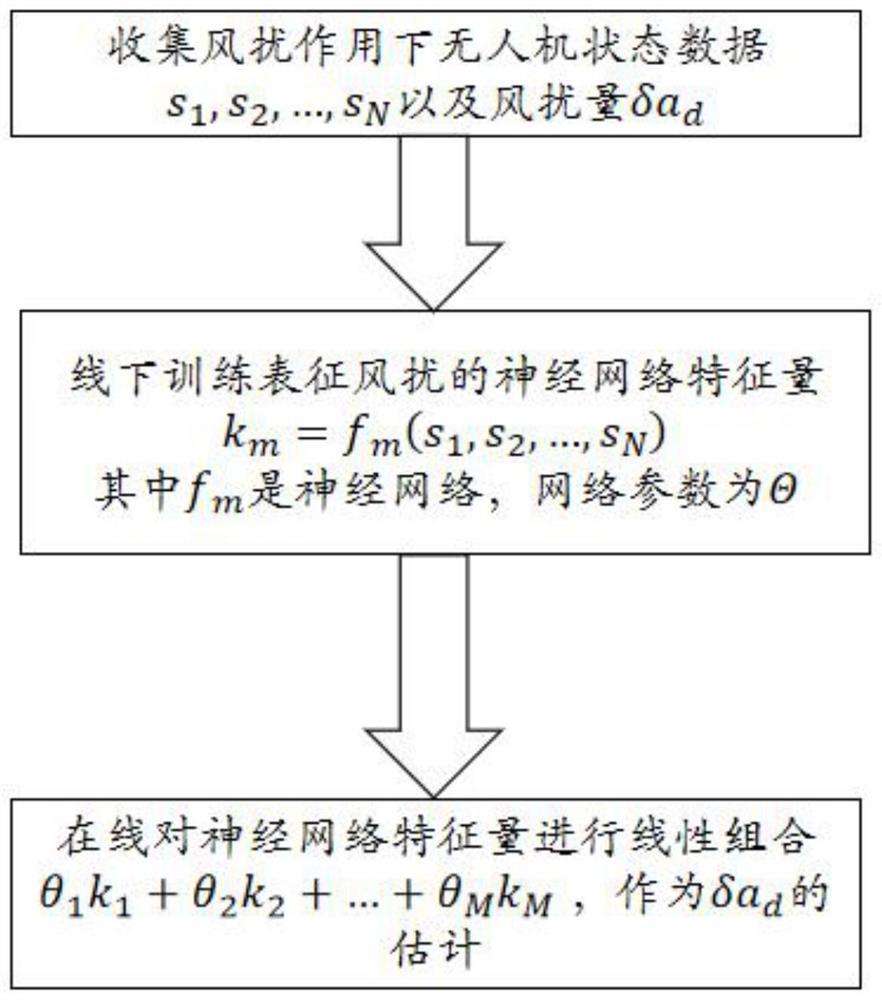
[0051] like figure 1 As shown, the present invention proposes a data-driven UAV wind disturbance model online wind disturbance estimation method, the specific steps include:
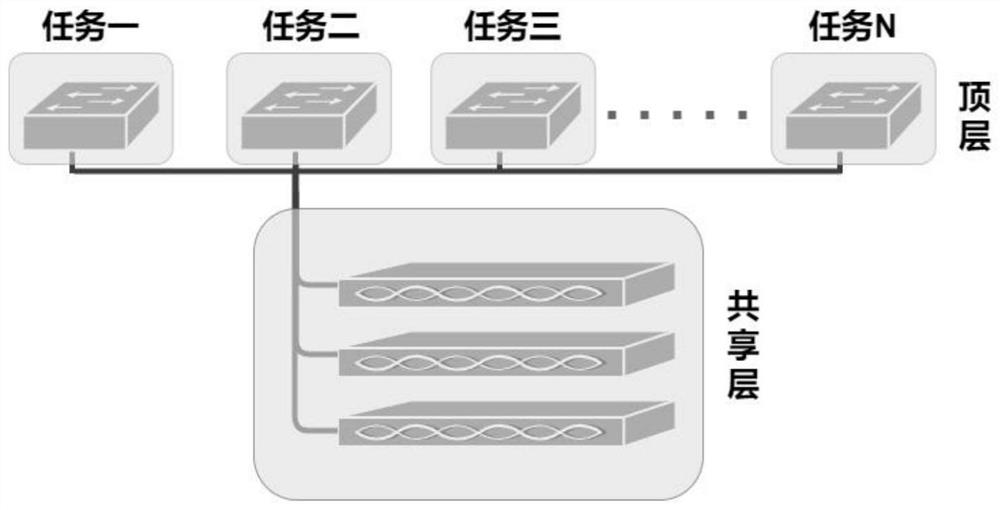
[0052] Step 1: Build a wind disturbance estimator: Define different wind disturbance environments as different wind disturbance tasks, and build the underlying parameter sharing HPS framework for different wind disturbance tasks. The bottom layer of the HPS framework is a shared layer, and the top layer is a single linear layer. All wind disturbance tasks share parameters at the bottom layer and are independent at the top layer.
[0053] For the learning of multiple wind disturbance tasks, the underlying parameter sharing (Hard Parameter Sharing, HPS) method is usually used to train the network. The basic framework is as follows: figure 2 shown. The HPS framework shows that no...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More