

Following vehicle state change estimation method considering transverse interference under double-lane driving
A technology of lateral interference and vehicle state, applied in the field of state change estimation of car-following vehicles, can solve problems such as the inability to quantify the influence of vehicles in the target lane
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The present invention will be further described below with reference to the accompanying drawings and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
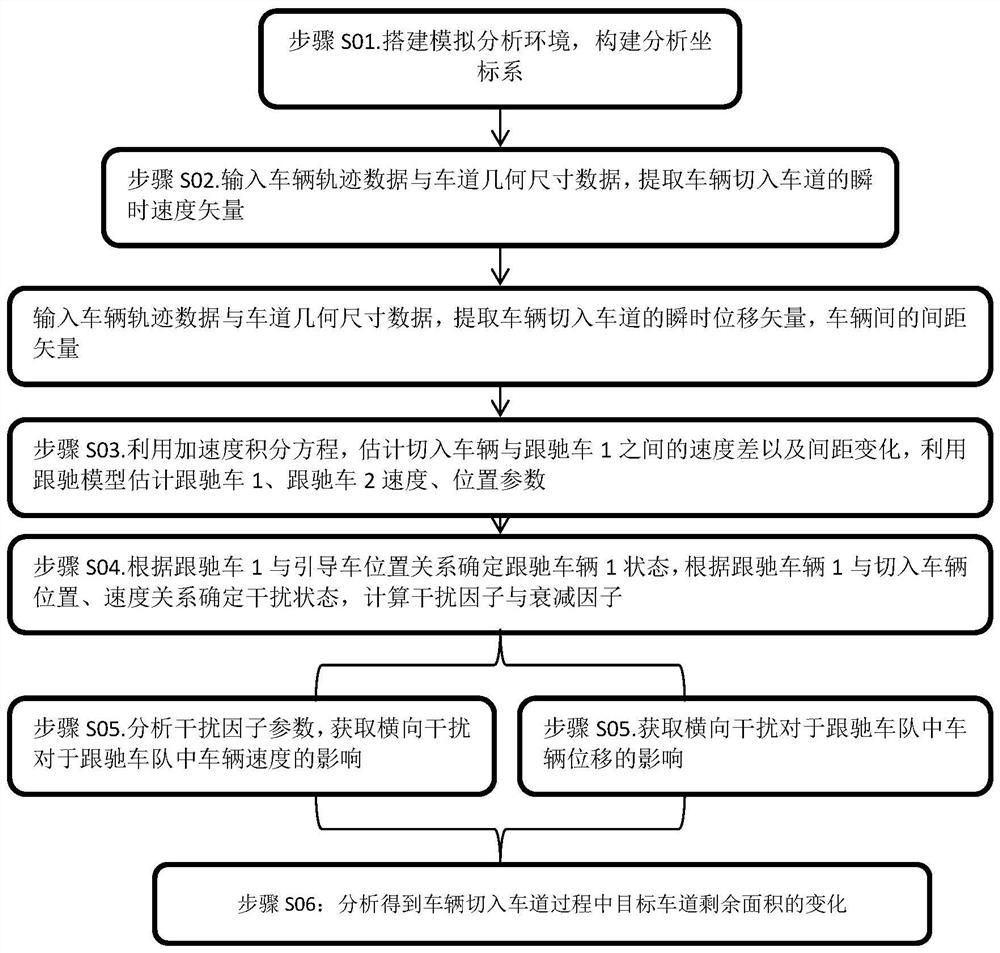
[0074] like figure 1 As shown in the figure, the steps of the method for estimating the state change of a following vehicle considering lateral interference under two-lane driving in this embodiment include:
[0075] Step S01. Construct a simulation analysis environment including a leading vehicle on the target lane, a cutting vehicle on an adjacent lane, and a vehicle following on the target lane, so as to simulate the lateral interference caused by the cutting vehicle cutting into the target lane under two-lane driving conditions Time-following vehicles and fleet speed characteristics change.
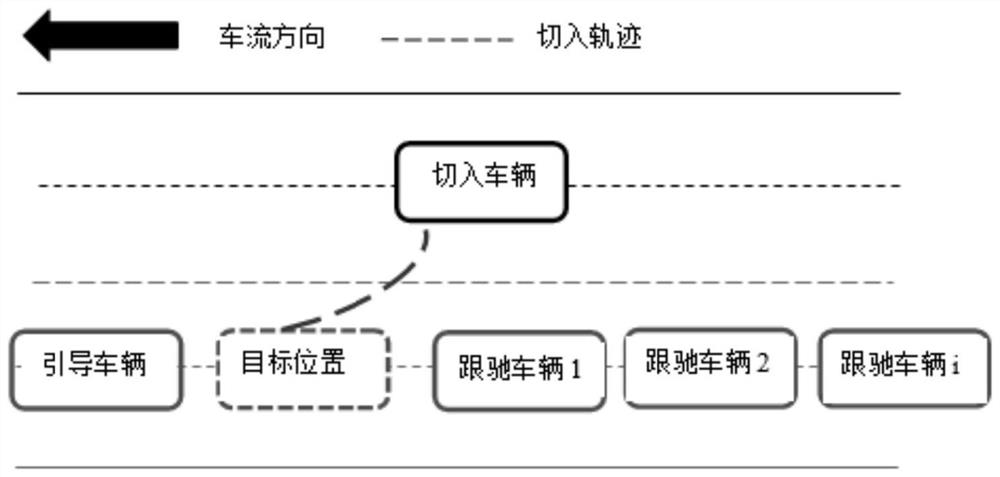
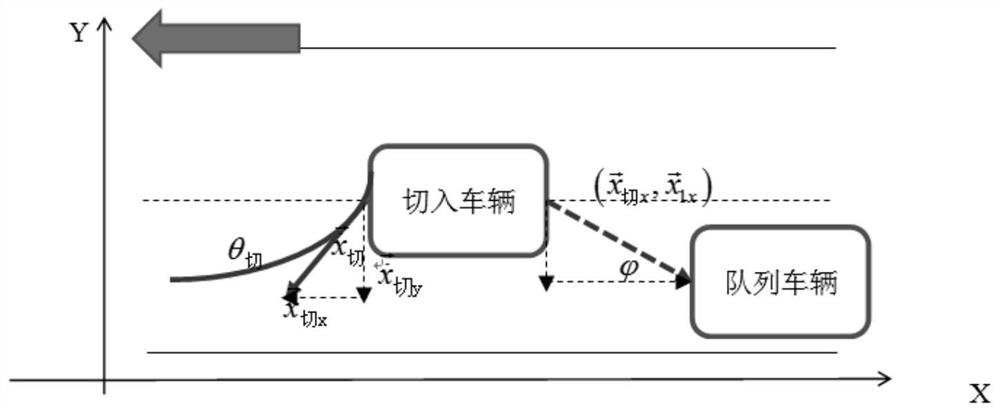
[0076] like figure 2 As shown in Figure 1, under the two-lane driving condition, this embodiment takes the cutting vehicle in the current lane entering the target lane...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More