

Ramp cooperative control system and method based on driving style
A driving style and collaborative control technology, applied in the field of intelligent driving, can solve problems such as difficult to achieve safe and personalized driving, poor adaptability, etc., and achieve the effect of improving adaptability, reliability and acceptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0101] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below with reference to the embodiments and the accompanying drawings, and the contents mentioned in the embodiments are not intended to limit the present invention.
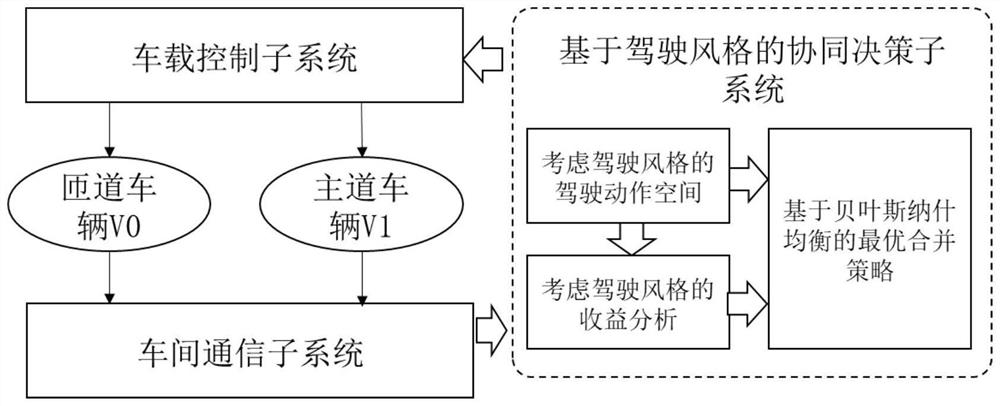
[0102] refer to figure 1 As shown, a driving style-based ramp cooperative control system of the present invention includes: an on-board control subsystem, an inter-vehicle communication subsystem, and a driving style-based collaborative decision-making subsystem;
[0103] The inter-vehicle communication subsystem is used to collect the traffic state S in the merge area of the ramp t and send it to the cooperative decision-making subsystem based on driving style; and receive the optimal control command a of the cooperative decision-making subsystem based on driving style t , and send it to the vehicle control subsystem;
[0104] Wherein, the vehicles in the ramp merge area include: ramp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More