

Mechanical arm control method and device
A robotic arm and joint technology, applied in the field of robotic arm control methods and devices, can solve the problems of large amount of calculation, low efficiency of target rotation angle, low efficiency of robotic arm control, etc., to reduce the amount of calculation, improve control efficiency and The effect of controlling real-time performance and improving computing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0099] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art based on the present invention fall within the protection scope of the present invention.
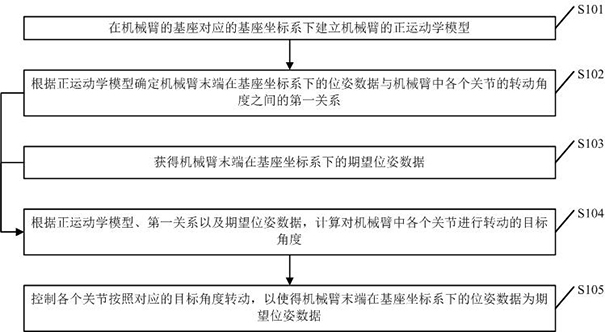
[0100] see Figure 1a , Figure 1a This is a schematic flowchart of a first method for controlling a robotic arm provided by an embodiment of the present invention. In this embodiment, the above method includes the following steps S101-S105.
[0101] Step S101 : establishing a forward kinematics model of the manipulator in the base coordinate system corresponding to the base of the manipulator.
[0102] Wherein, the above-mentioned ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More