

Obstacle avoidance detection system for unmanned aerial vehicle
A detection system and UAV technology, applied in three-dimensional position/channel control and other directions, can solve the problem that the network wall cannot be detected and is easy to hit obstacles, so as to reduce the probability of false detection of obstacles on the network wall, reduce The probability of hitting the wall obstacles and improving the detection effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
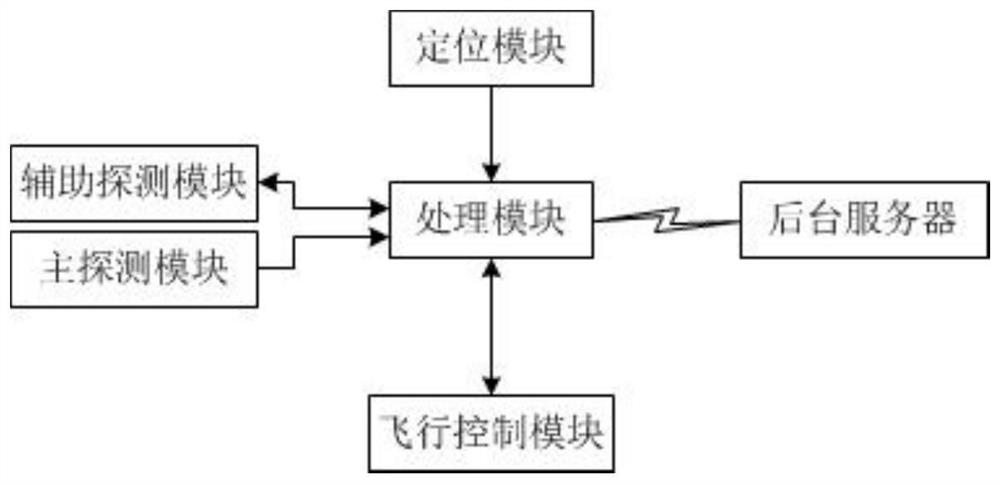
[0032] Obstacle avoidance detection systems for drones, such as figure 1 As shown, it includes a main detection module, a processing module, a flight control module, a background server, a positioning module and an auxiliary detection module. The signal of the main detection module is connected to the processing module. The main detection module includes an ultrasonic unit and a camera unit. The ultrasonic unit detects obstacles of obstacles The ultrasonic unit can use the ultrasonic detector on the existing UAV, the camera unit can take the flight image of the obstacle as the obstacle information, and the camera unit can use the existing aerial camera. The processing module can use the existing SOC chip, the signal of the processing module is connected to the flight control module, the flight control module can use the flight controller of the existing drone, and the processing module can wirelessly communicate with the background server through the existing 3G communicator, a...
Embodiment 2
[0044] The difference between the obstacle avoidance detection system for the UAV and the first embodiment is that when the auxiliary permission information is obtained, the processing module sends a deceleration signal to the flight control module, and the flight control module controls the UAV to reduce the flight speed. During auxiliary detection, reduce the flying speed of the UAV to prevent the UAV from hitting the network wall and being stuck due to its high speed. Accuracy of wall obstacles.
Embodiment 3
[0046] The difference between the obstacle avoidance detection system for drones and the first embodiment is that the processing module calculates the pixel width of the rod-shaped object on the flight image when it is determined to have a rod-shaped object. and compare the pixel width with the set width. The set width is set according to the existing interference sources. For example, the set width is 1cm. When the pixel width is greater than the set width, the processing module will then perform the calculation of the number of rods. count.
[0047] When a rod-shaped object is identified, first determine the width of the rod-shaped object, and then count when the width is greater than the set width, so as to eliminate the interference of some columnar communication base stations or poles, and reduce misjudgment caused by interference factors. The amount of data processing is large.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More