

End-to-end binocular stereo matching network with extremely small calculation amount based on full binary convolution
A technology of binocular stereo matching and computational complexity, applied in computing, biological neural network models, instruments, etc., can solve the problem of large computational complexity of stereo matching solutions, and achieve the effect of improving feature quality and reducing overhead.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be further explained below in conjunction with the accompanying drawings.
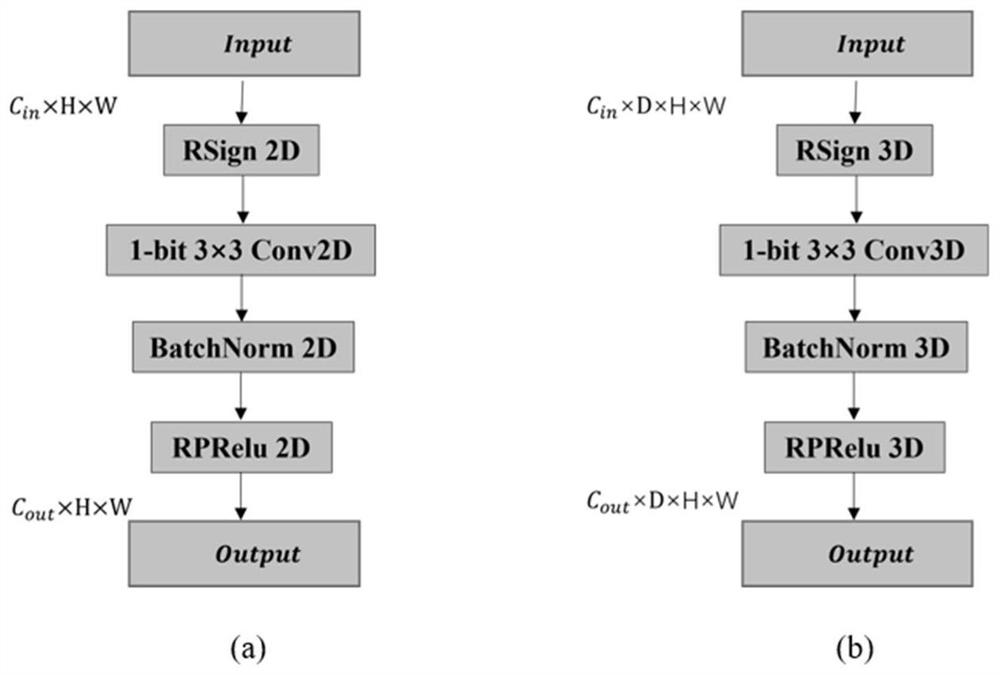
[0054] A binary 2D convolution module dedicated to stereo matching, such as figure 1 As shown in (a), when the input and output feature maps are 3-dimensional data:
[0055] Step A1: Binarization operation on the input feature map: The input feature map will be processed by the RSign2D symbol function, and then binarized to -1 / +1 after adding the corresponding offset value to the channel dimension;
[0056] Step A2: Binarization operation on the weights: firstly obtain the mean value of the weights in the channel dimension as the channel scaling factor, and then use the Sign function to binarize the weights to -1 / +1;
[0057] Step A3: Binary convolution operation: Convolve the binary input feature map obtained in step A1 with the binary weight obtained in step A2, and then multiply the channel dimension by the channel scaling factor obtained in step A2 to obtain two. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More