

Compact transmission structure of adjacent joints and mechanical arm
A transmission structure, compact technology, applied in the direction of manipulators, program control manipulators, joints, etc., can solve the problems of unfavorable miniaturization and light weight of robots, inability to obtain power output, and inability to obtain robots, and achieve compact structure, reliability and safety. , the effect of strong power output
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] In order to make those skilled in the art better understand the technical solutions of the present invention, the present invention will be further described in detail below with reference to specific embodiments.
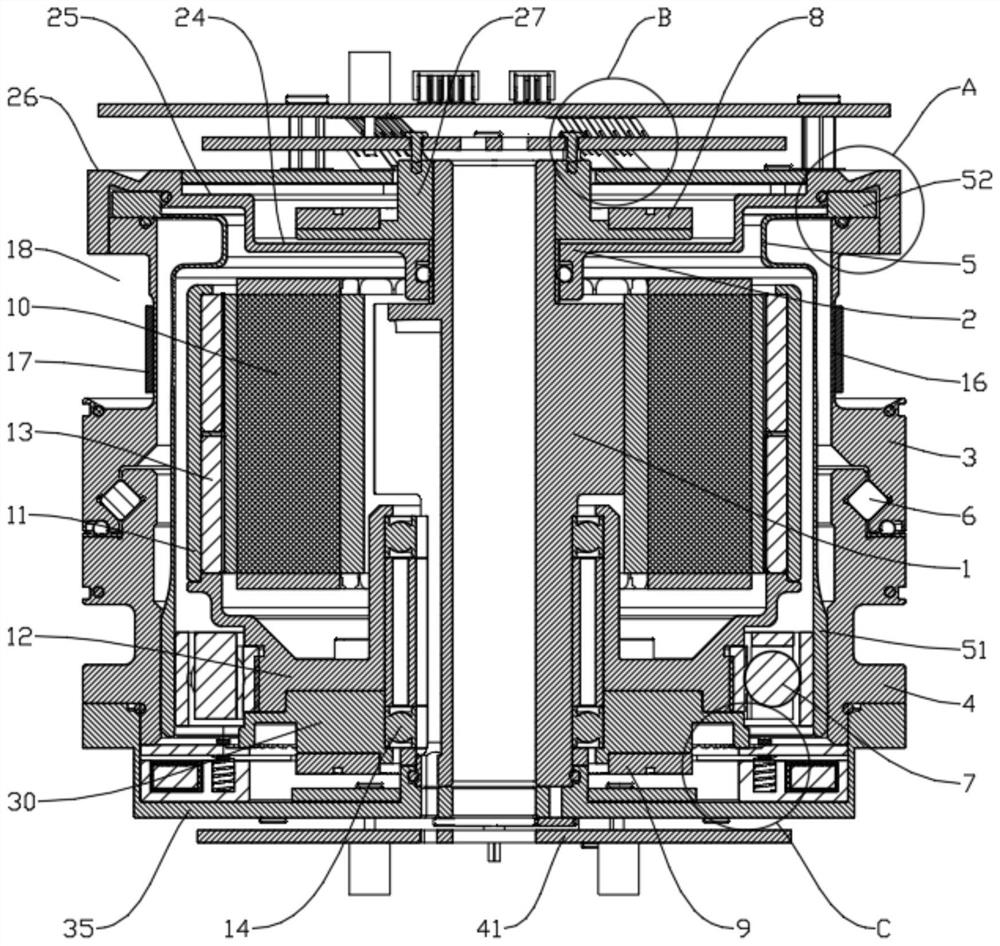
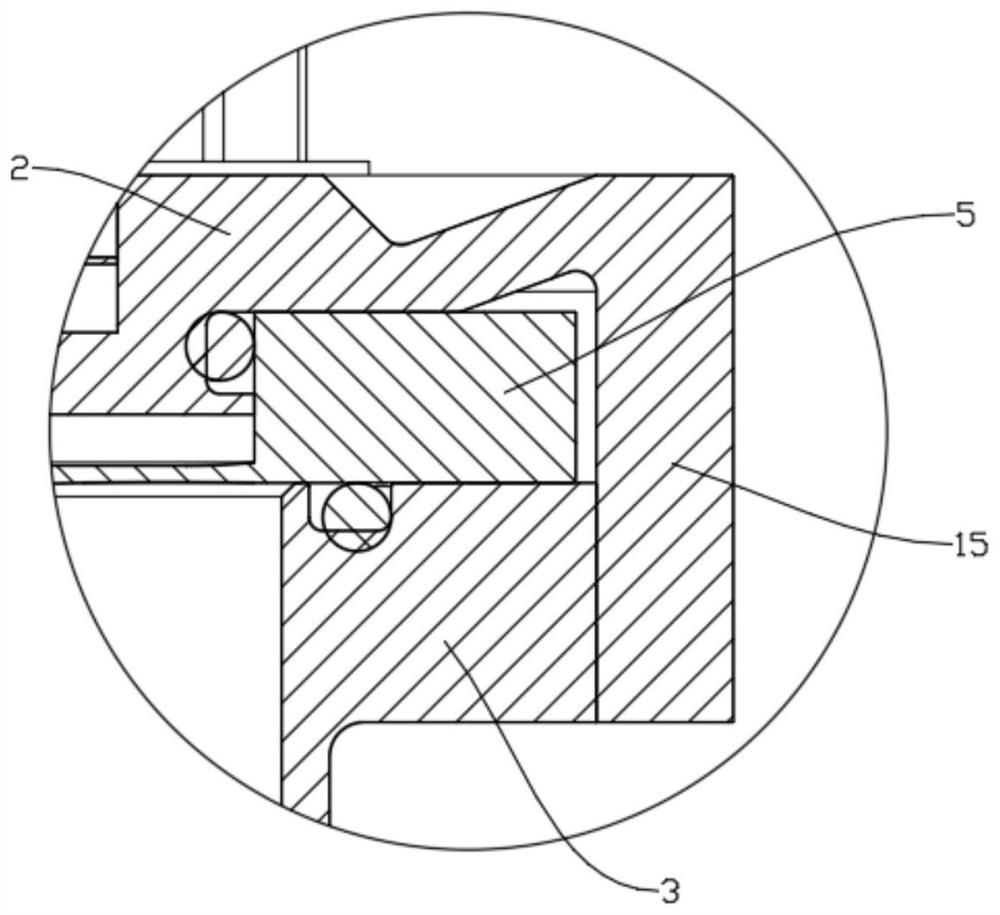
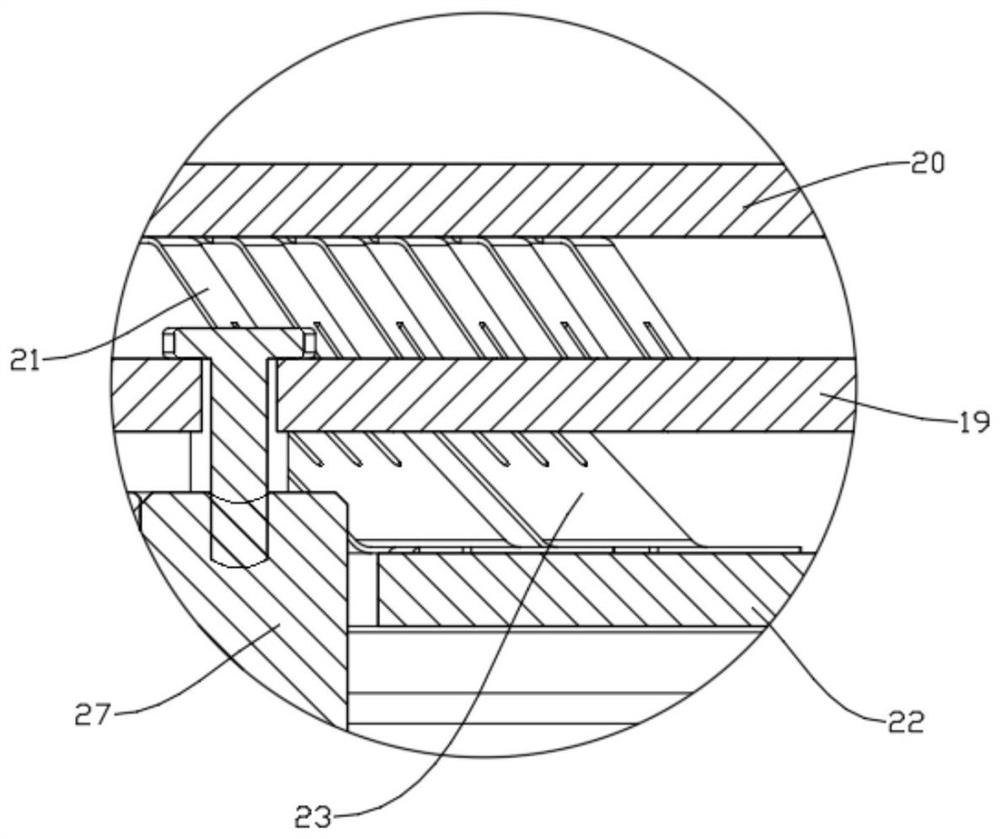
[0061] like Figure 1 to Figure 4 As shown, the compact transmission structure of adjacent joints includes a hollow shaft 1, a power source, a first end cover 2, an outer ring 3, an inner ring 4 and a flexible wheel 5; the fixed end of the power source is sleeved on the hollow shaft The outer side of 1; the first end cover 2 is sleeved on the outer side of the hollow shaft 1, and is rotatably connected with the hollow shaft 1; the inner ring 4 is slidably connected with the outer ring 3 through the roller 6; the flexible wheel 5 is Hat-shaped or U-shaped structure, one end of which is the mouth end 51 and the other end is the bottom end 52; the inner side of the mouth end 51 is connected with the rotating end of the power source through the flexible bearing ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More