

Target identification and positioning tracking method and system for micro-nano robot
A target recognition, positioning and tracking technology, applied in the field of micro-nano robots, can solve problems such as inaccurate recognition and inability to recognize pixels, and achieve the effect of overcoming poor adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052]In order to make the purpose, technical solutions and advantages of the present application more clearly understood, the present application will be described in further detail below with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are only used to explain the present application, but not to limit the present application.
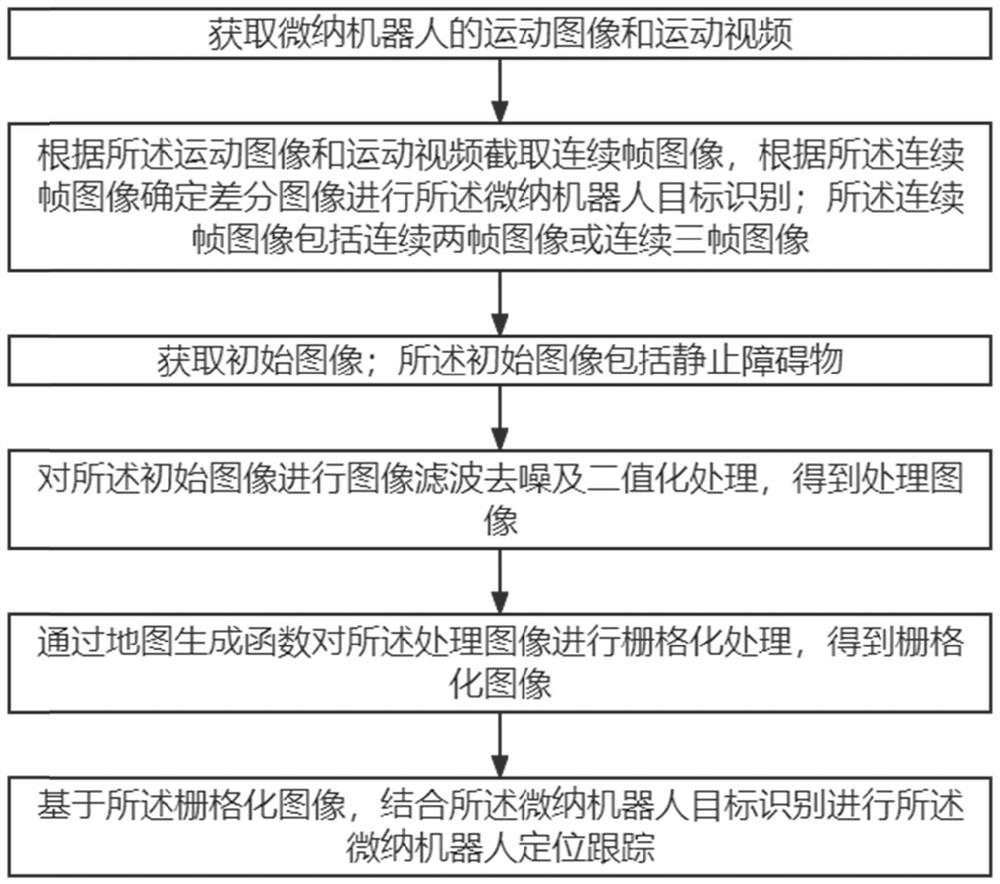
[0053] In view of the problems existing in the prior art, in the first aspect, the present invention provides a method for target recognition and positioning and tracking of a micro-nano robot, such as figure 1 As shown, the method includes the following steps:
[0054] Obtain moving images and moving videos of micro-nano robots;
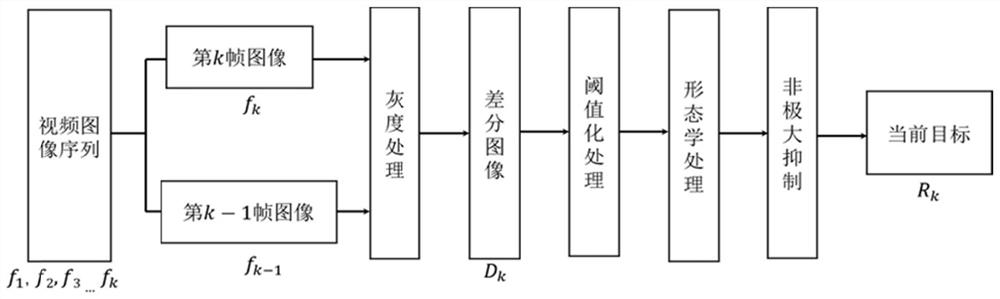
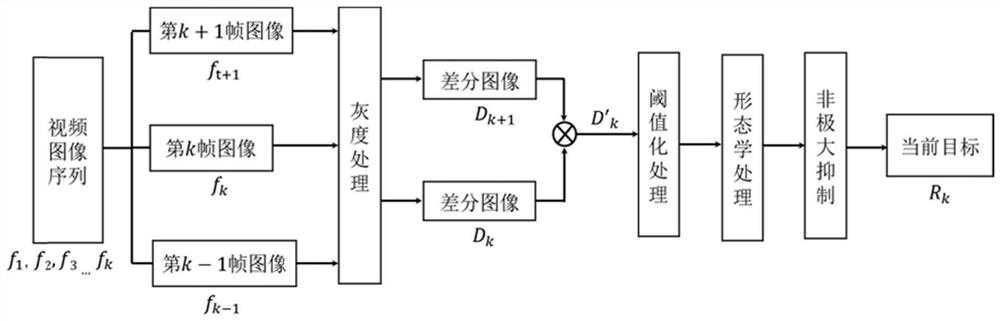
[0055] Intercept continuous frame images according to the moving images and moving videos, and determine a differential image according to the continuous frame images to perform the target recognition of the micro-nano robot; the continuous ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More