

Bio-robot waist mechanism
A humanoid robot and waist technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as reducing the stability of humanoid robot motion, limiting the range of motion of humanoid robots, and improving the center of gravity of humanoid robots. The effect of motion and power performance, reduction of power consumption, improvement of compliance and anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
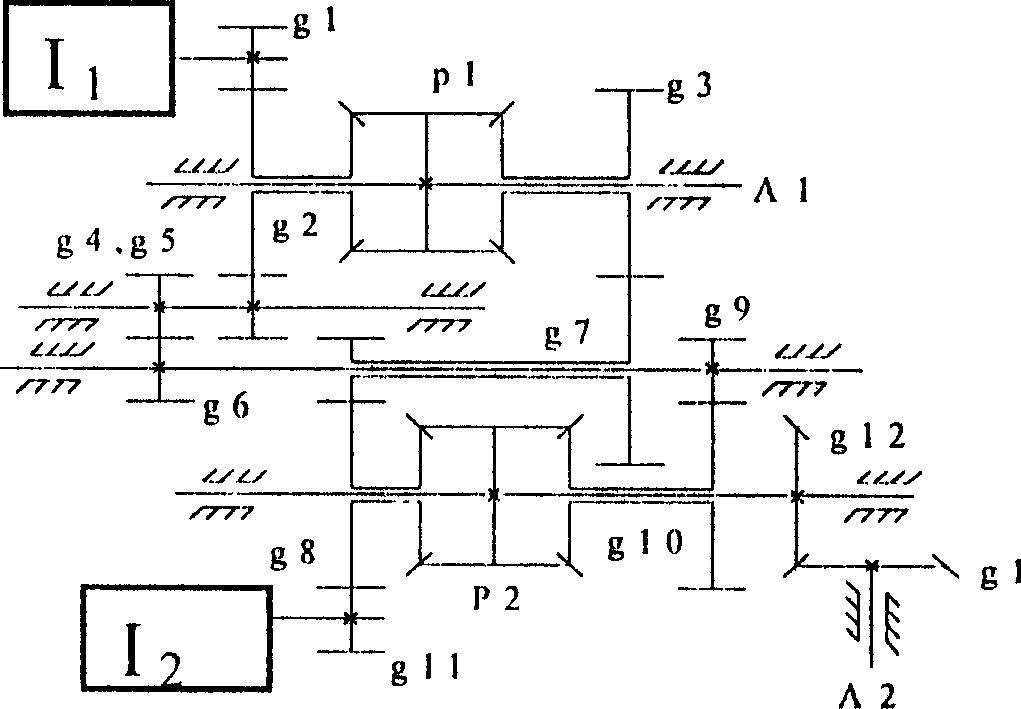
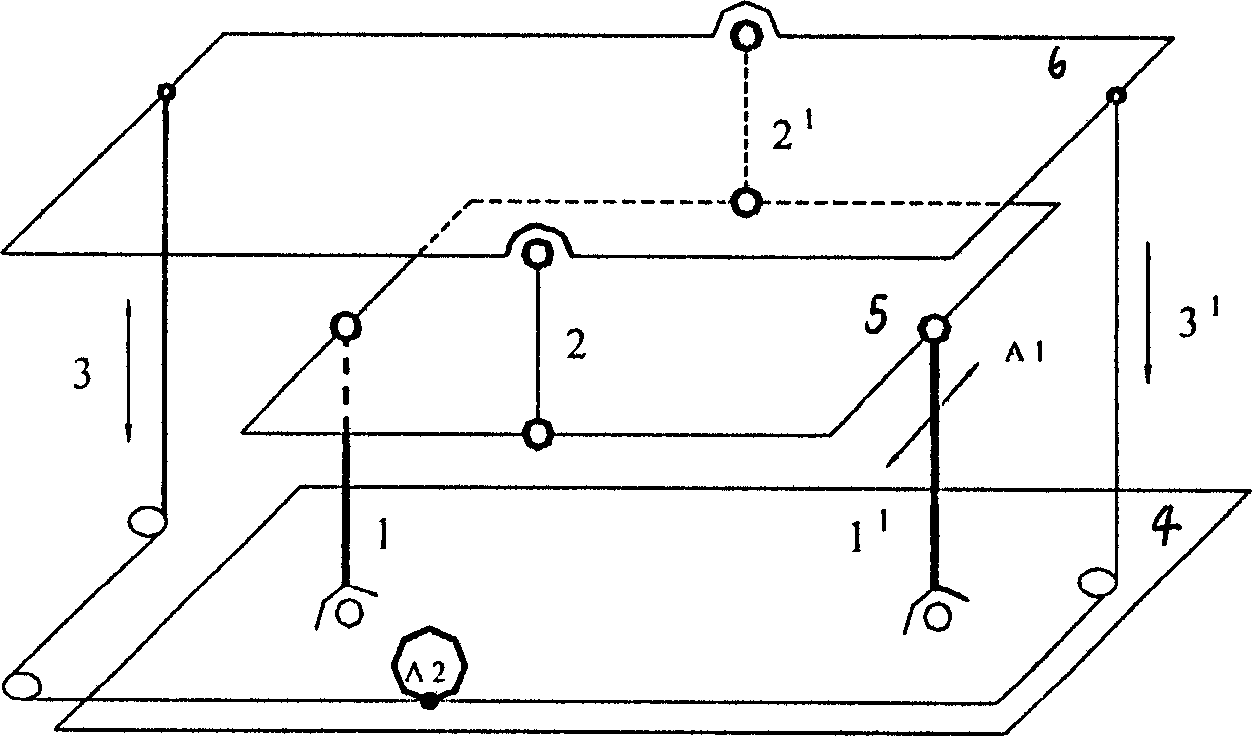
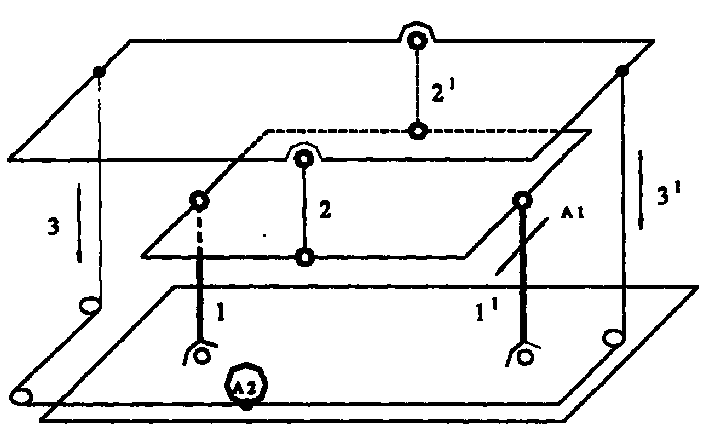
[0019] Such as Figure 1~2 As shown, the present invention is composed of two differential gear train closed transmission mechanisms, upper and lower plates, middle plates, connecting rods, flexible cables, wherein: the two differential gear trains have two degrees of freedom, and the two differential gear trains drive After being closed, it still has two degrees of freedom, and the two differential gear train transmission mechanisms are installed on the lower plate 4, and the first and second connecting rods 1, 1 1 The upper end is fixedly installed on the transverse central axis of the middle plate 5, and the first and second connecting rods 1, 1 1 The lower end is hinged on the transverse central axis of the lower plate 4, the first connecting rod 1 lower end is connected with the first and second motors 1 1 , I 2 Co-driven first output shaft A ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More