Vision registering method for medical robot
A technology of robots and surgical robots, which is applied in surgical robots, medical science, surgery, etc., can solve the problems of high price, manual operation by doctors, and high cost, and achieve the effect of low price, simple and convenient operation, and high positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
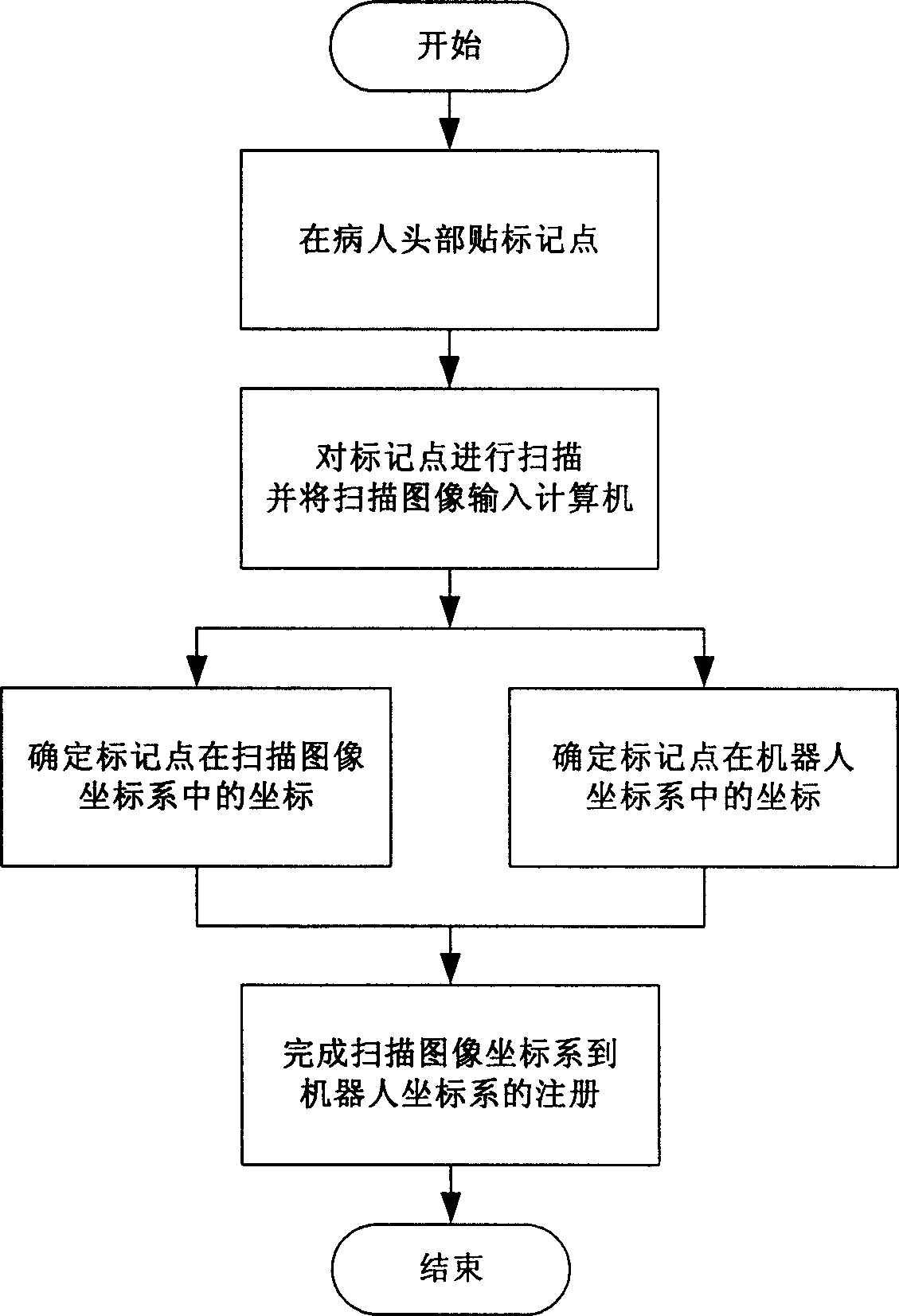
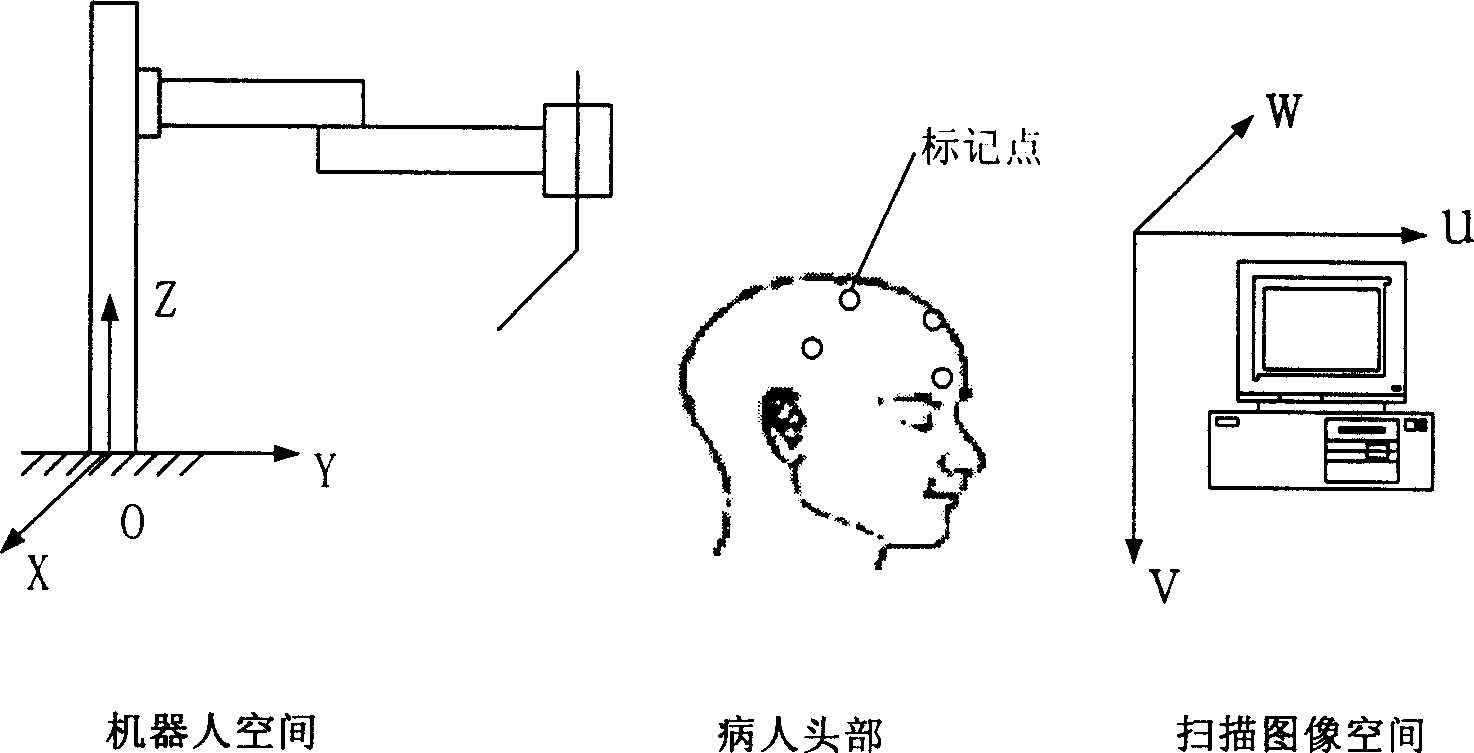
[0023] In robot-assisted stereotaxic neurosurgery, after the patient's head is scanned by scanning imaging equipment, the image is input to the computer's "surgery planning software", and the doctor outlines the lesion in the scanned image through the software, and determines the target point and puncture path . The "surgery planning software" converts the doctor's plan in the scanned image into the target pose of the robot in the robot coordinate system, and controls the robot to align with the target according to the planned path to guide the doctor to perform the operation. To complete the conversion from the scanned image coordinate system to the robot coordinate system, it is necessary to establish a mapping relationship between the scanned image coordinate system and the robot coordinate system, that is, to complete the registration betw...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap