

Miniature creeping vehicle based on shape memory alloy driving
A technology of memory alloy and memory alloy spring, which is applied in the field of robots and can solve the problems of complex control sequence and large power consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
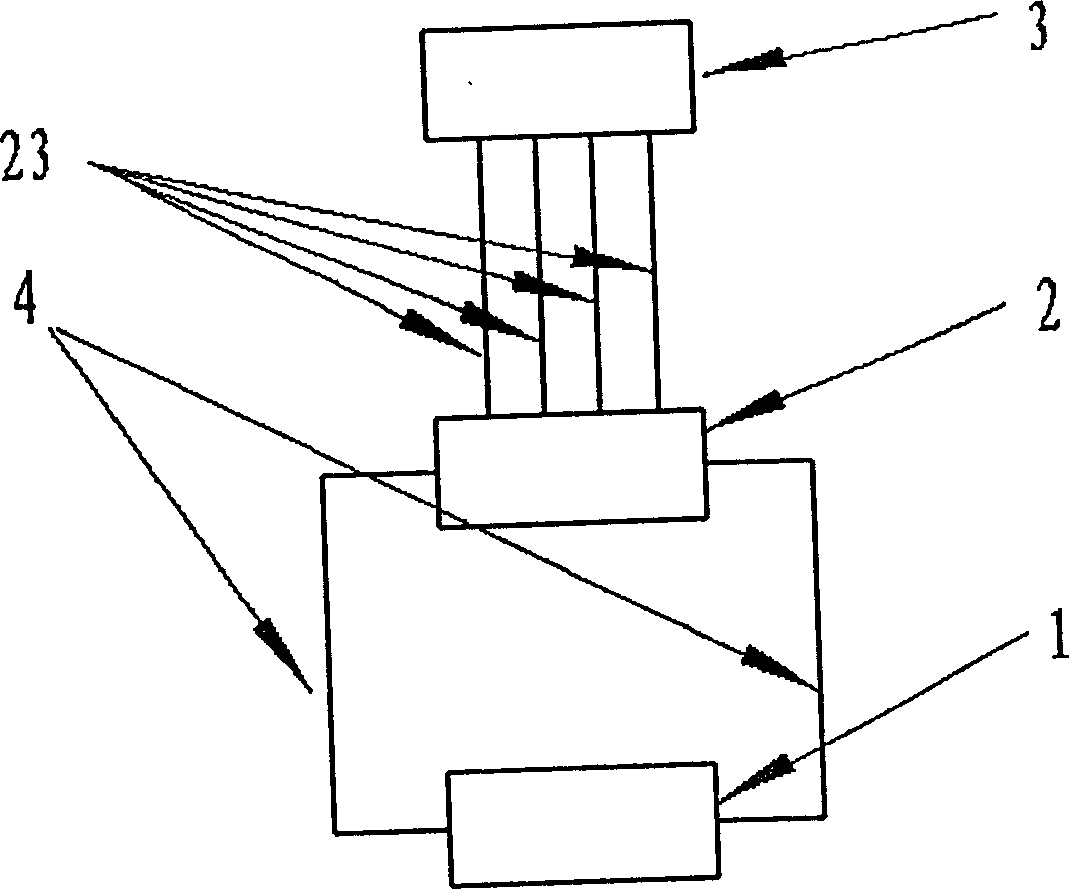
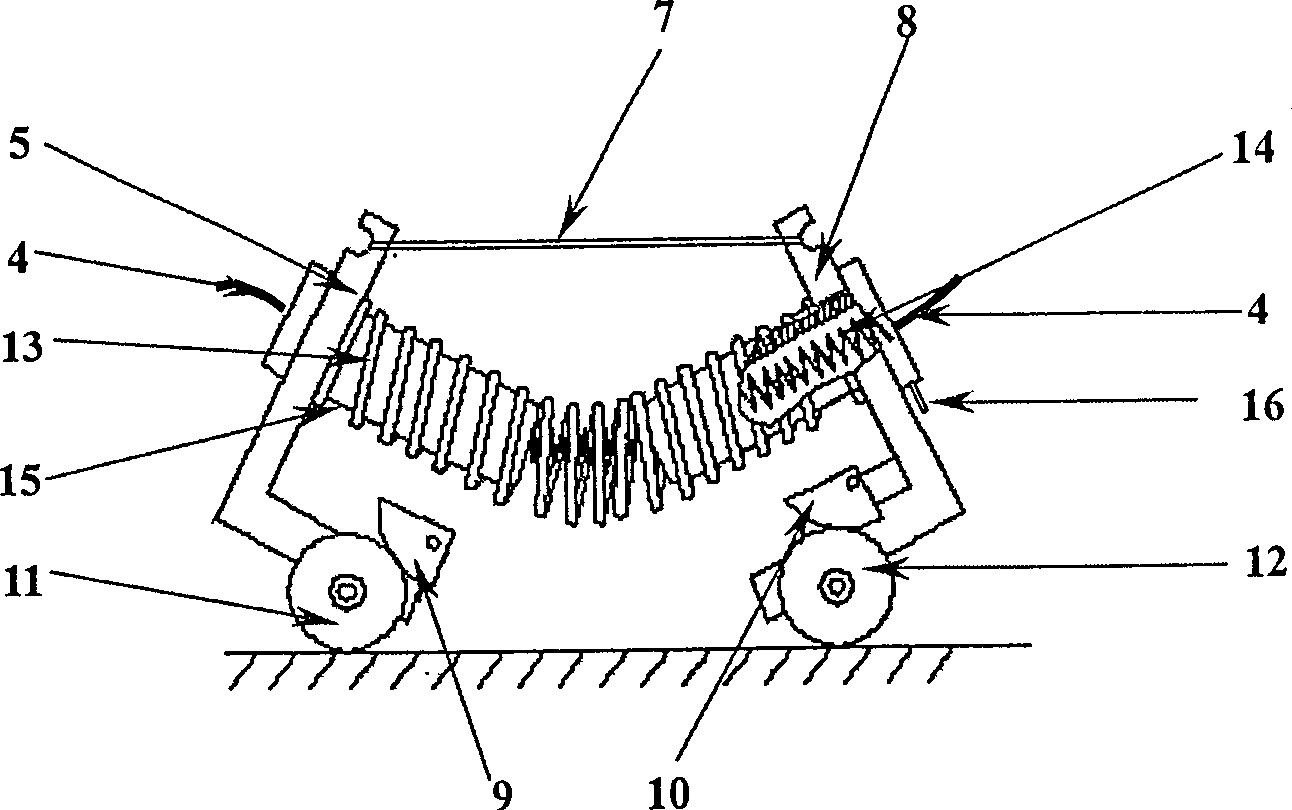
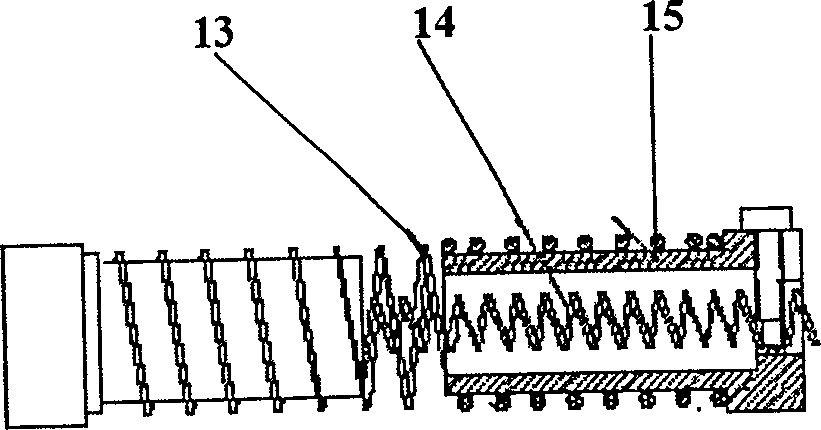
[0023] like figure 1 , figure 2 , image 3 and Figure 4 As shown, the present invention mainly includes: a mechanism body 1, a control system 2 and a power supply device 3, two output leads 4 of the control system 2 are connected to the mechanism body 1, four input leads 23 are connected to the power supply device 3, and the mechanism body 1 Mainly includes: front car body 5, shape memory alloy driver 6, elastic rod 7, rear car body 8, front wheel self-locking mechanism 9, rear wheel self-locking mechanism 10, front wheel 11 and rear wheel 12. The connection method is : The elastic rod 7 is hinged with the front car body 5 and the rear car body 8, the front car body 5 and the front wheel 11, the front car body 5 and the front wheel self-locking mechanism 9, the rear car body 8 and the rear wheel 12, and the rear car body 8 It is connected with the rear wheel self-locking mechanism 10 through the axles respectively. The shape memory alloy driver 6 is connected with the fro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More