

Positioning servocontroller
A technology of servo controller and control part, applied in the direction of digital control, program control, electrical program control, etc., to achieve the effect of simplifying gain adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
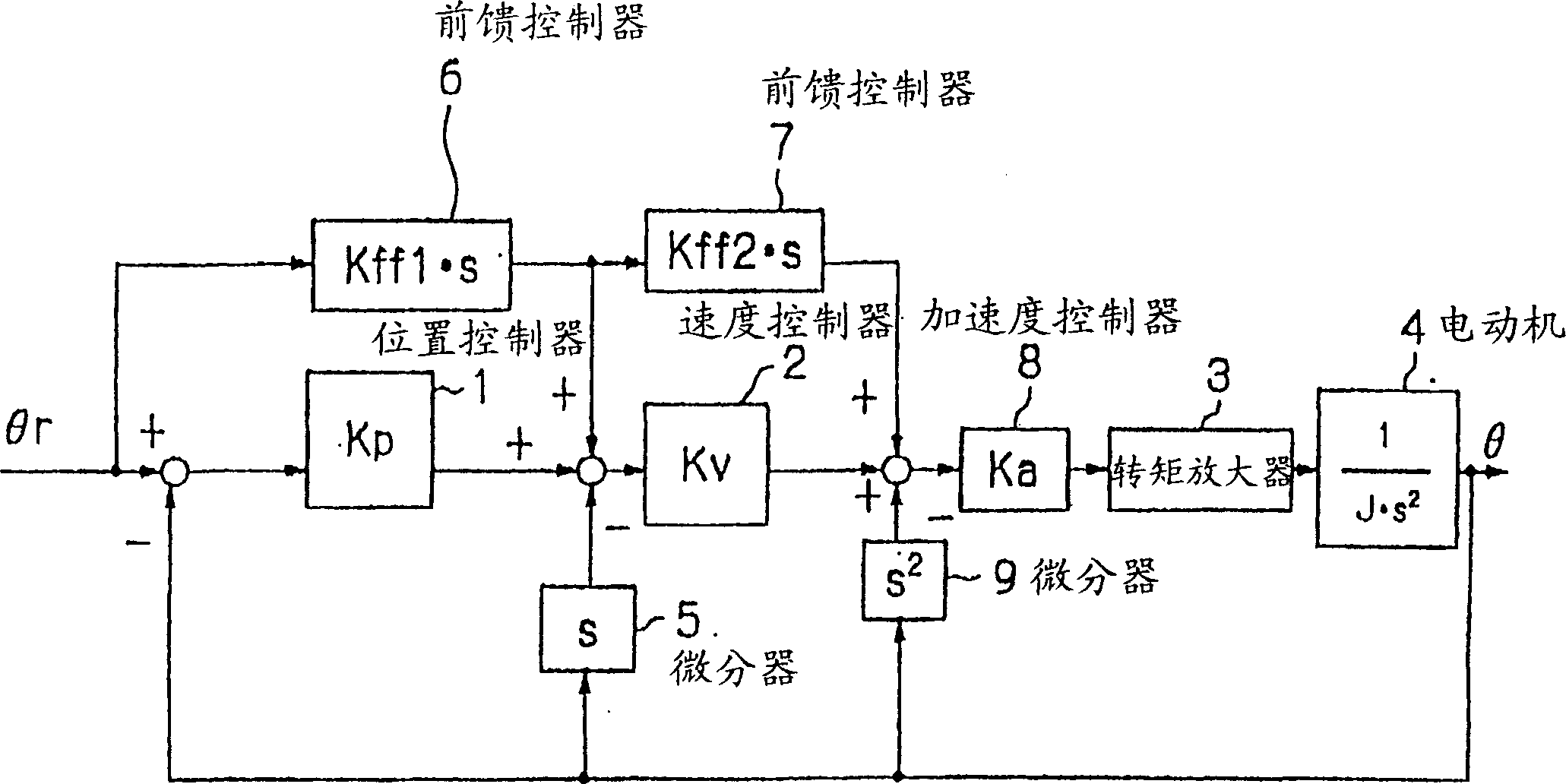
[0149] First, refer to Figure 1 to Figure 4 , the positioning servo controller according to the first embodiment of the present invention which achieves the first object will be described.
[0150] figure 1 is a control block diagram showing the configuration of a positioning servo controller of one embodiment. The positioning servo controller of this embodiment and Figure 32 The difference of the existing positioning servo controller is that the controller includes an acceleration controller 8 and a differentiator 9 .
[0151] The differentiator 9 takes the second-order differential of the position response θ of the motor 4 to output the acceleration of the motor 4 . The acceleration controller 8 is a proportional controller that receives an acceleration deviation, that is, a value obtained by adding the value output from the speed controller 2 and the value output from the feedforward controller 7, and the value obtained from the differentiator 9 outputs the accelerat...
Embodiment 2-1
[0174] Figure 5 It is a block diagram showing the configuration of the positioning servo controller of the embodiment 2-1.
[0175] exist Figure 5 in, with Figure 6 Components that are the same as those are denoted by the same reference numerals, and thus descriptions thereof are omitted.
[0176] The positioning servo controller of this embodiment is constituted as, in Figure 6 In the shown conventional positioning servo controller, amplifiers 101 and 102 are respectively provided behind the position controller 1 and the speed controller 2 .
[0177] Amplifier 101 multiplies the value output from position controller 1 by adjustment gain Kg, and outputs the resultant value as speed command ωr. Amplifier 102 multiplies the value output from speed controller 2 by adjustment gain Kg, and outputs the resultant value as torque command Tr.
[0178] To make the description simple and clear, in this embodiment, as in the prior art embodiment, it is assumed that the controlled...
Embodiment 2-2
[0198] The positioning servo controller of Embodiment 2-2 will be described below.
[0199] Figure 8 is a block diagram showing the configuration of the positioning servo controller according to the second embodiment of the present invention.
[0200] In the positioning servo controller of this embodiment, the present invention is applied to a positioning servo controller in which the position is controlled by P (proportional) control and the speed is controlled by P-I (proportional-integral) to control.
[0201] The positioning servo controller of this embodiment is constituted as, in Figure 5 The positioning servo controller of the first embodiment shown is also provided with an integrator 16 and an amplifier 103 .
[0202] The integrator 16 integrates the speed deviation between the speed command ωr and the speed ω of the motor 4, and outputs a value obtained by multiplying the integral result by an integral gain Ki. Amplifier 103 multiplies the value output from inte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More