Spatial five freedom degree parallel robot mechanism
A degree of freedom, robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of less 5 degrees of freedom, low stiffness, low precision, etc., to achieve wide application prospects, low motion quality, and large number of parts. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
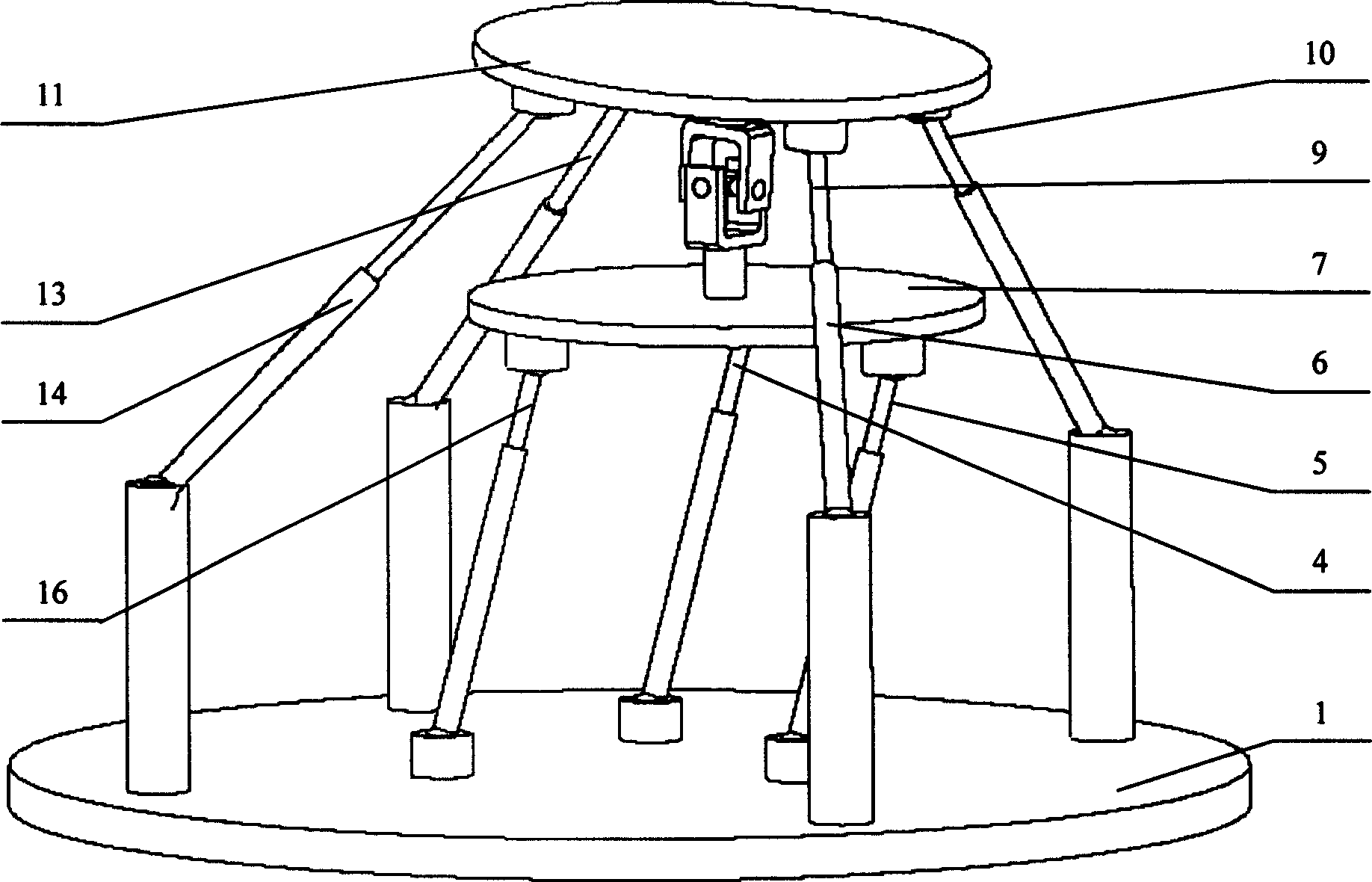
[0023] The overall structure of an embodiment of the present invention is as figure 1 As shown, the parallel robot mechanism includes a fixed platform 1, an intermediate platform 7, a moving platform 11, a branch connecting the moving platform 7 and the fixed platform 1, a branch connecting the intermediate platform 7 and the fixed platform 1, and connecting the moving platform 11 and the intermediate platform 7 branches. The moving platform 11 and the fixed platform 1 are connected through four branches 9, 10, 13 and 14 with identical structures to form a parallel closed-loop structure. A spherical joint with a degree of freedom, or a spherical joint with three degrees of freedom and a Hooke joint, or a spherical joint with three degrees of freedom and a cylindrical pair are connected to the moving platform 11 and the fixed platform 1; the moving platform 11 and the intermediate platform 7 are connected through a Hooke hinge Connection; the middle platform 7 is connected to ...
Embodiment 2
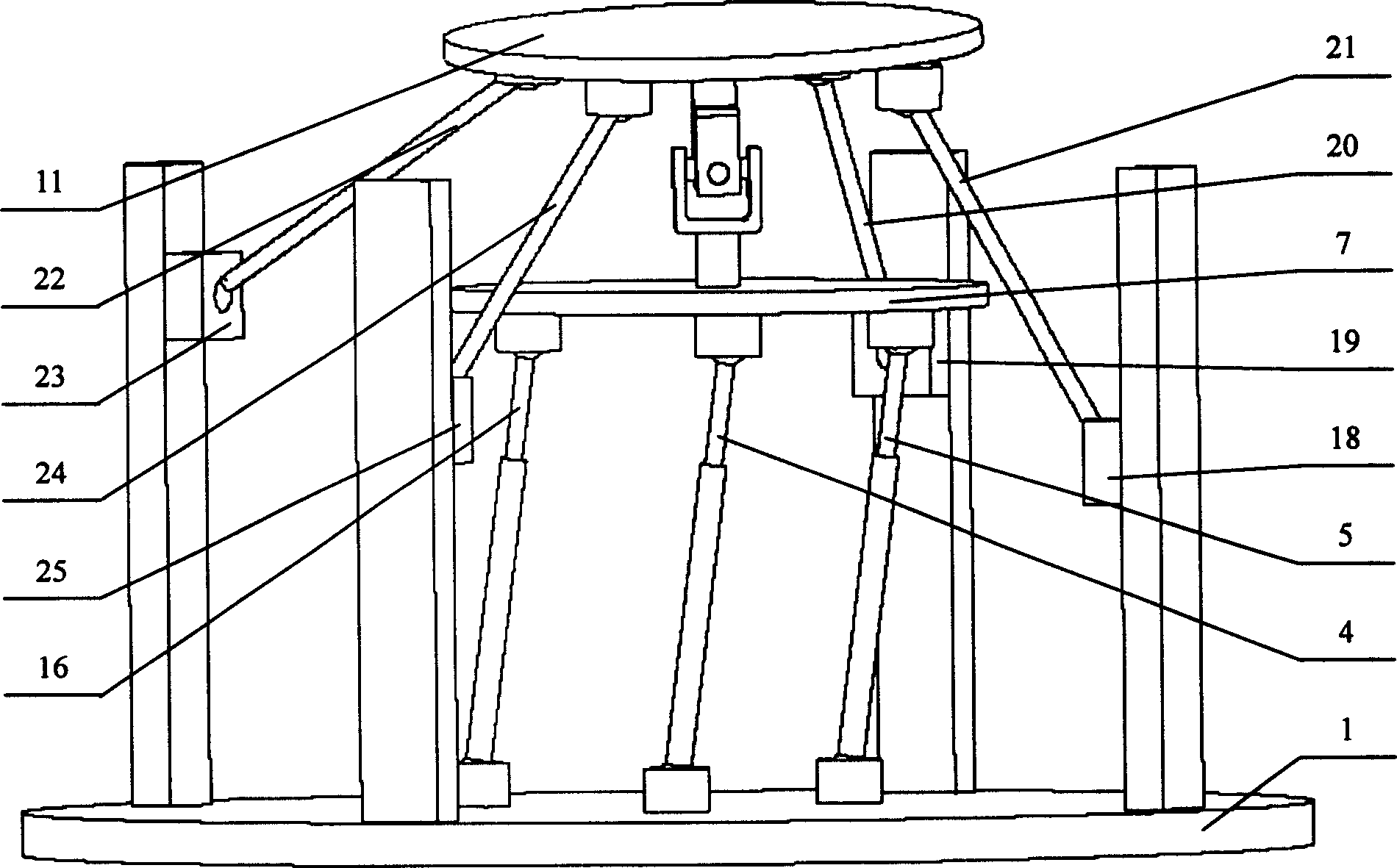
[0025] The overall structure of another embodiment of the present invention is as figure 2 As shown, the parallel robot mechanism includes a fixed platform 1, an intermediate platform 7, a moving platform 11, a branch connecting the moving platform 7 and the fixed platform 1, a branch connecting the intermediate platform 7 and the fixed platform 1, and connecting the moving platform 11 and the intermediate platform 7 branches. The moving platform 11 and the fixed platform 1 are connected by four identical branches to form a parallel closed-loop structure. Each branch includes a slideway fixed on the fixed platform, slide blocks 18, 19, 23, 25 and fixed-length connecting rods 21, 20, 22, 24, one end of the fixed-length connecting rod is connected with the Hooke hinge arranged on the slide block, and the other end is connected with the moving platform 11 through a three-degree-of-freedom spherical hinge. The moving platform 11 is connected to the middle platform 7 through a Ho...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap