

Remote center of motion robotic system and method
A technology of robots and linkage devices, applied in surgical robots, program-controlled manipulators, manipulators, etc., can solve problems such as limited range of motion and achieve uniform mechanical properties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The purpose and technical features of the present invention will be more clearly understood with reference to the following description and accompanying drawings.
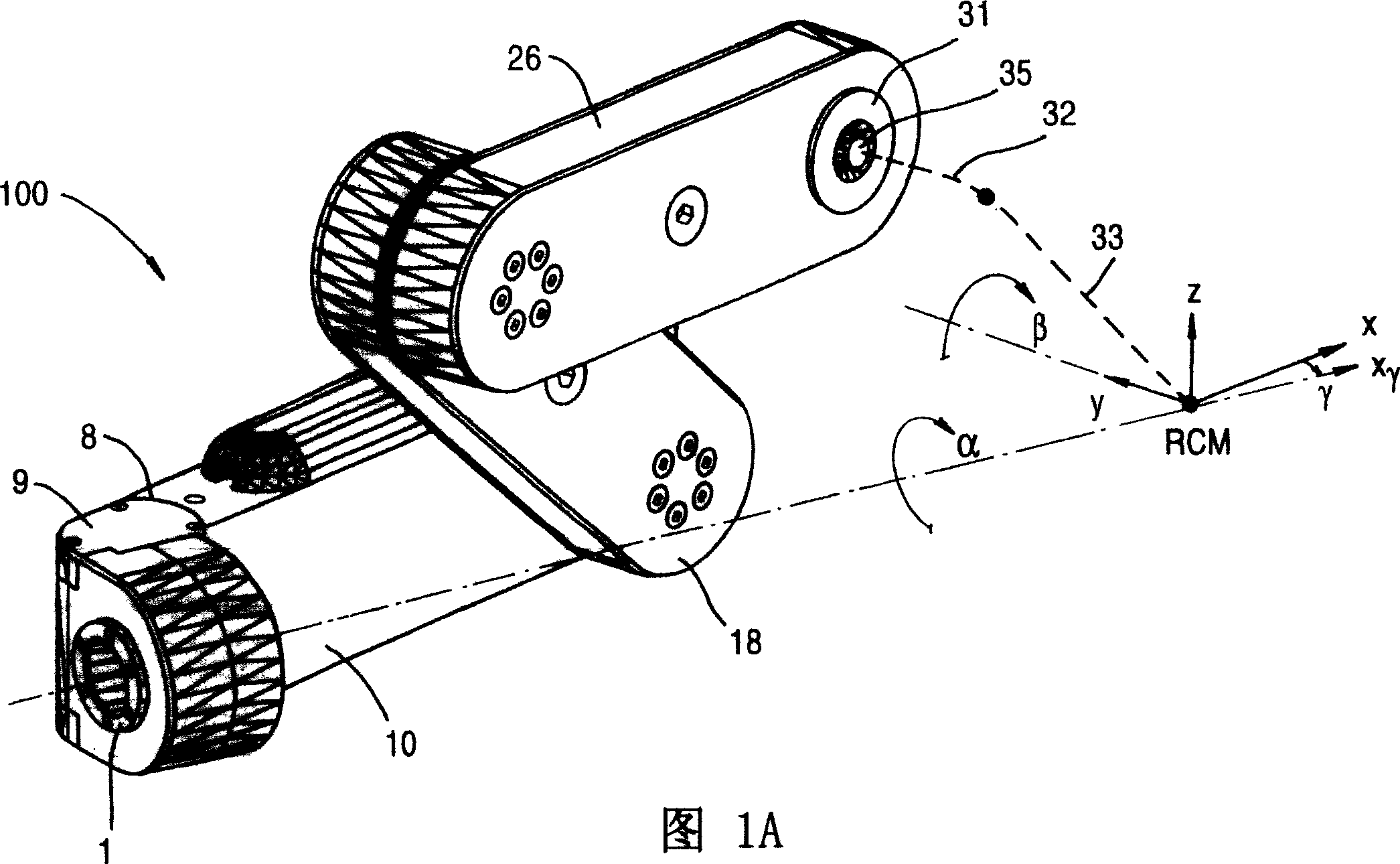
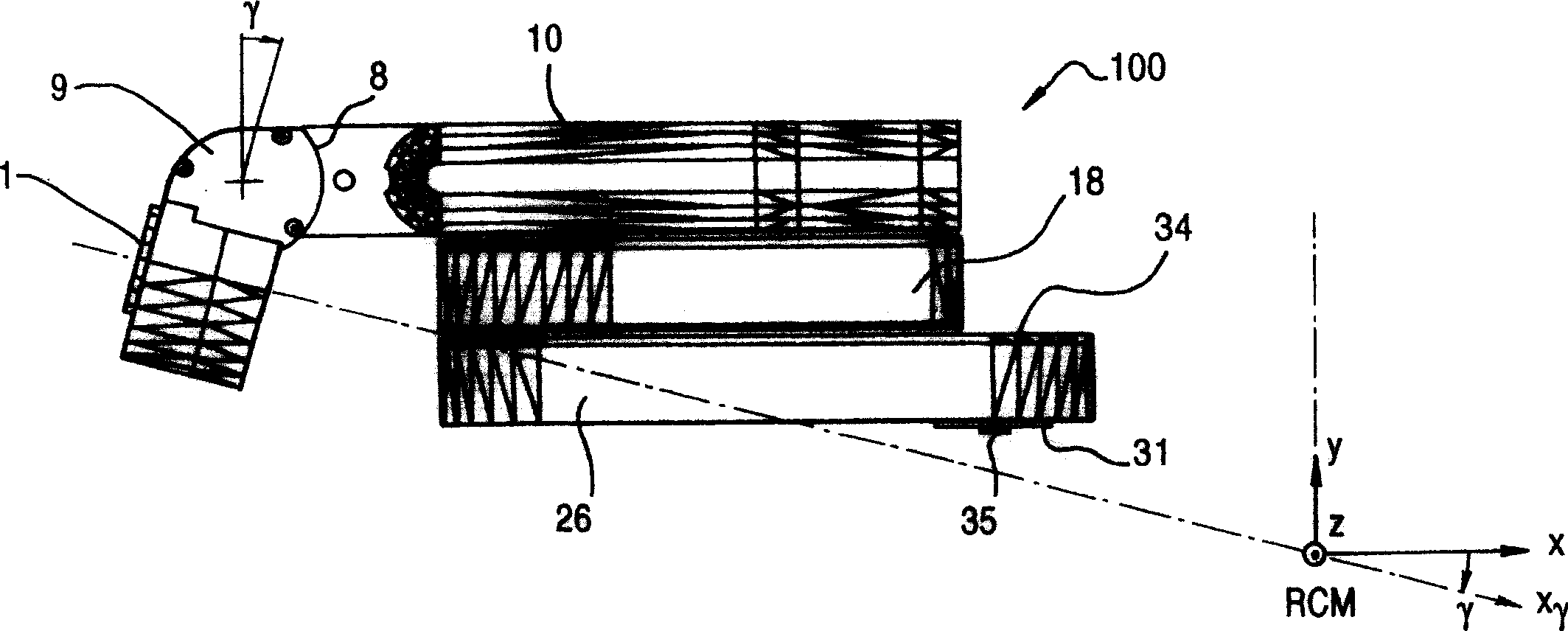
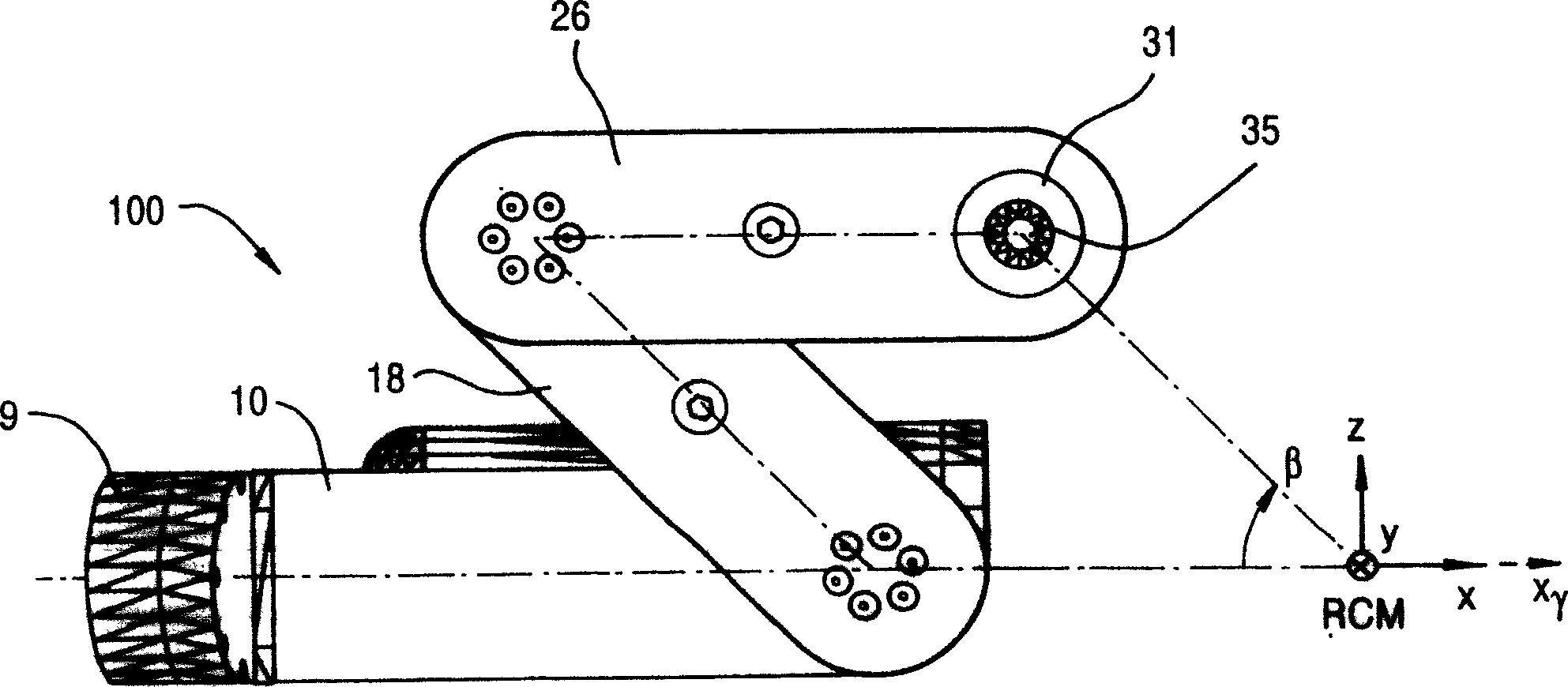
[0031] The present invention provides a novel apparatus and method for performing image-assisted surgery. The present invention includes a robotic device or module that can be used to orient an end effector about two axes that intersect at a fixed geometric point located remote from the mechanical device, specifically a pivot point, referred to as the Remote Center for Motion (RCM) in this manual. An end effector, for example, is a robotic tool such as a needle drive, which can be mounted on the RCM module and can be turned around the RCM point, which is conveniently located on the end effector because this point is far away from the robot module.
[0032] The present invention is designed so that the two axes coincident at the geometric point of the RCM have two rotational degrees of freedom (DOF). The p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More