

Acceleration control method of vehicle follow gallop sports
An acceleration control, vehicle following technology, applied in the direction of speed/acceleration control, non-electric variable control, adaptive control, etc., can solve problems such as vehicle speed shock, and achieve the effect of easy understanding and processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
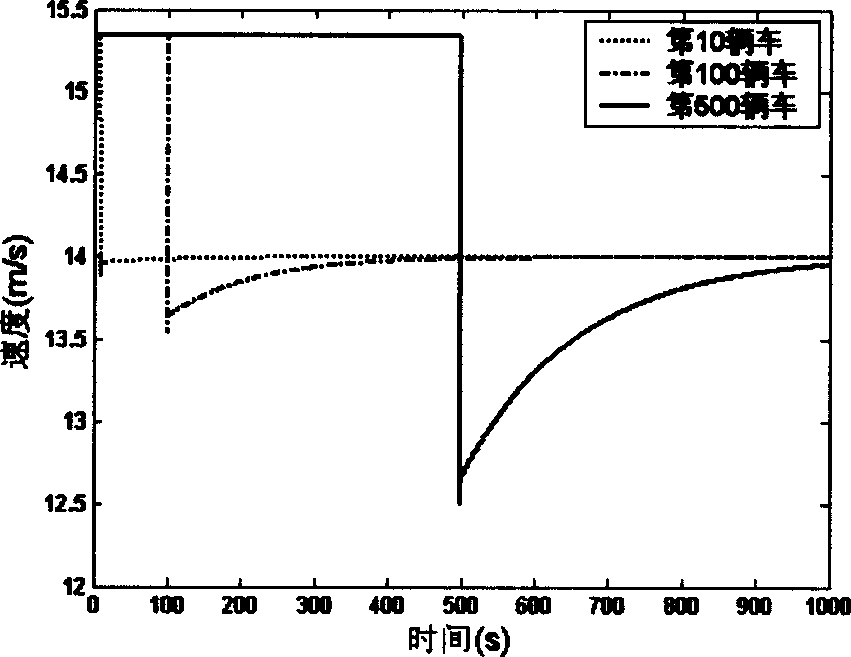
[0030] Embodiment 1: A slow vehicle appears in front of the queue of vehicles traveling at a constant speed.
[0031] (1) Traffic situation setting: select a queue of vehicles traveling at a constant speed, and the distance between vehicles is h 0 =25m; when the zero time (initial time) is set, a slow car appears at a distance of 25m ahead of the vehicle queue, and the slow car will always maintain a relatively low-speed uniform motion state. The total number of vehicles is N=500, the number of slow vehicles is 1, and the vehicles are numbered sequentially according to the driving direction.
[0032] (2) Select parameter value: According to the above setting, select α=1 / 40s -1 , β=3.5s -1 , τ=1s, τ 1 =0.1s and V(Δx n (t-τ))=16.8(tanh(0.0860(Δxn (t-τ)-25))+0.913)
[0033] G ( Δ v n ( t - τ 1 ...
Embodiment 2
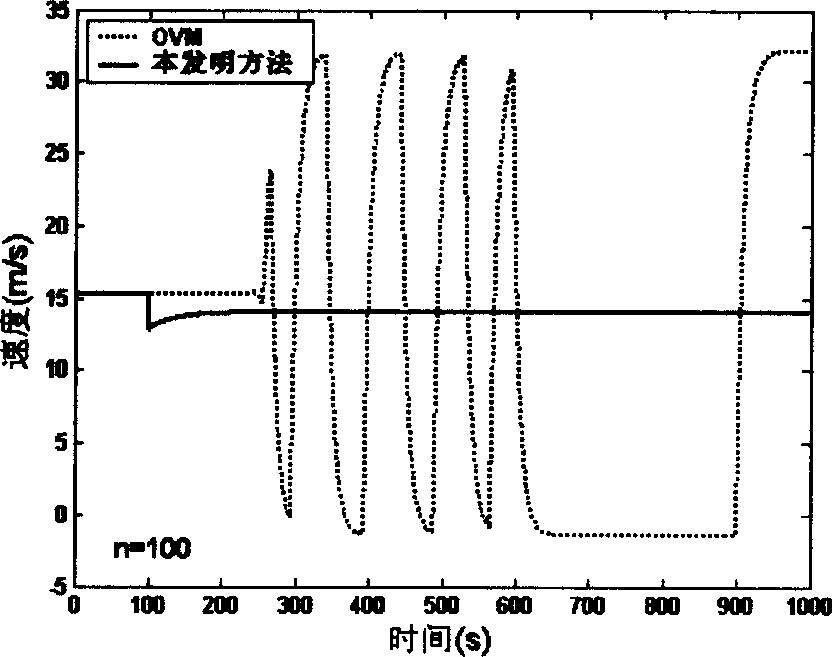
[0038] Example 2: The movement of the queue of vehicles waiting in front of the traffic light after the red light turns green
[0039] (1) Traffic situation setting: select a queue of waiting vehicles, and the distance between vehicles is h 0 =7m; when setting the zero moment (initial moment), the interfering vehicle parked at a distance of 7m in front of the vehicle queue with an acceleration of 5m / s 2 Accelerate to 15m / s all the time, then keep moving at a constant speed, and the vehicle queue starts at the same time. The total number of vehicles is N=500, and the number of the interfering vehicle is also 1, and the vehicles are numbered sequentially according to the driving direction.
[0040] (2) Select parameter value: According to the above setting, select α=1 / 10s -1 , β=1.5s -1 , τ=1s, τ 1 =0.1s and V(Δx n (t-τ))=16.8(tanh(0.0860(Δx n (t-τ)-25))+0.913)
[0041] G ( Δ v n ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More