

Device for calibrating parallel force transducer in six dimensions
A six-dimensional force sensor and calibration device technology, applied in the direction of measurement device, instrument, force/torque/work measurement instrument calibration/test, etc., can solve the problems of unsystematic, inaccurate sensor calibration, low sensor loading accuracy, etc. Achieve the effects of low manufacturing cost, guaranteed accuracy, and simple device structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
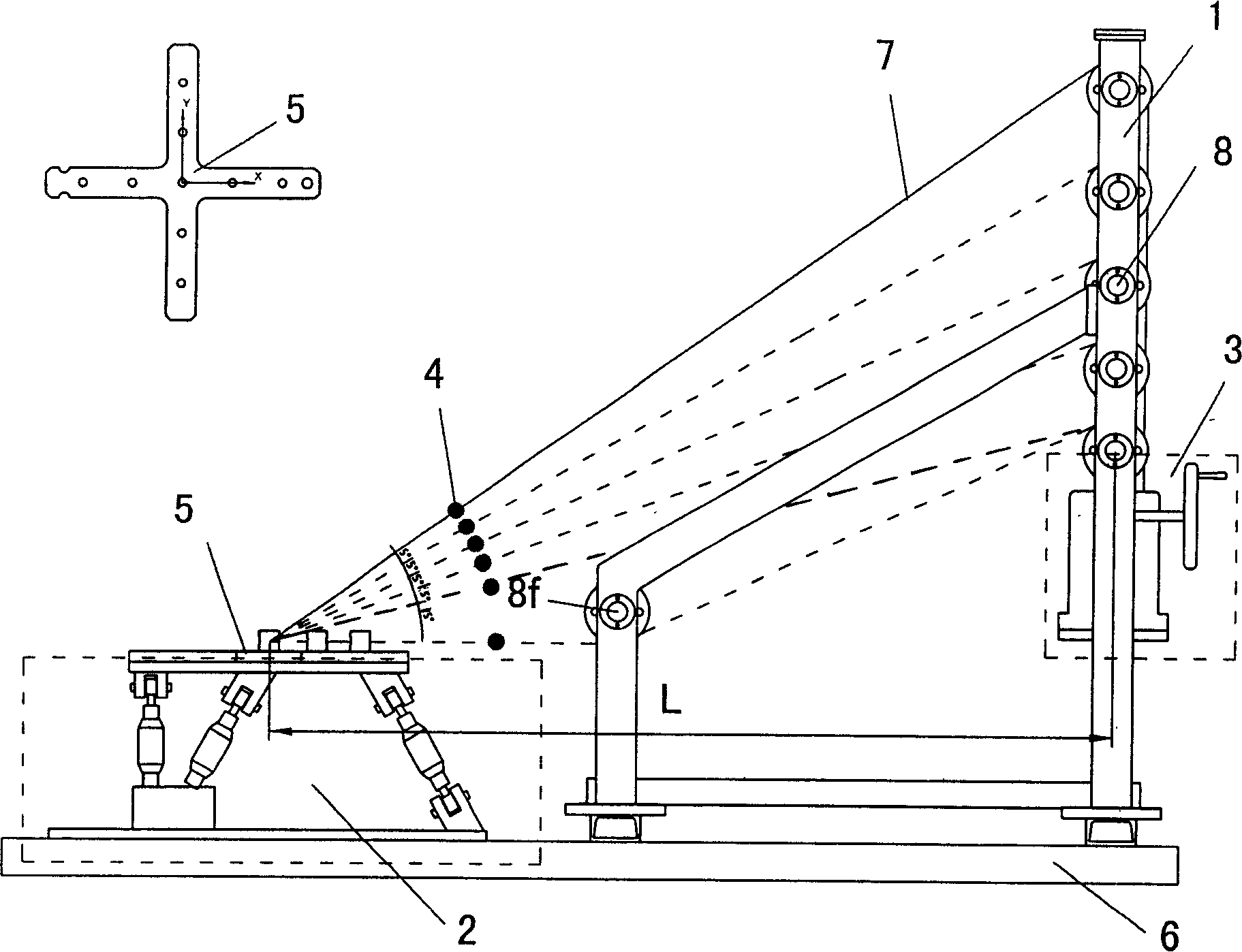
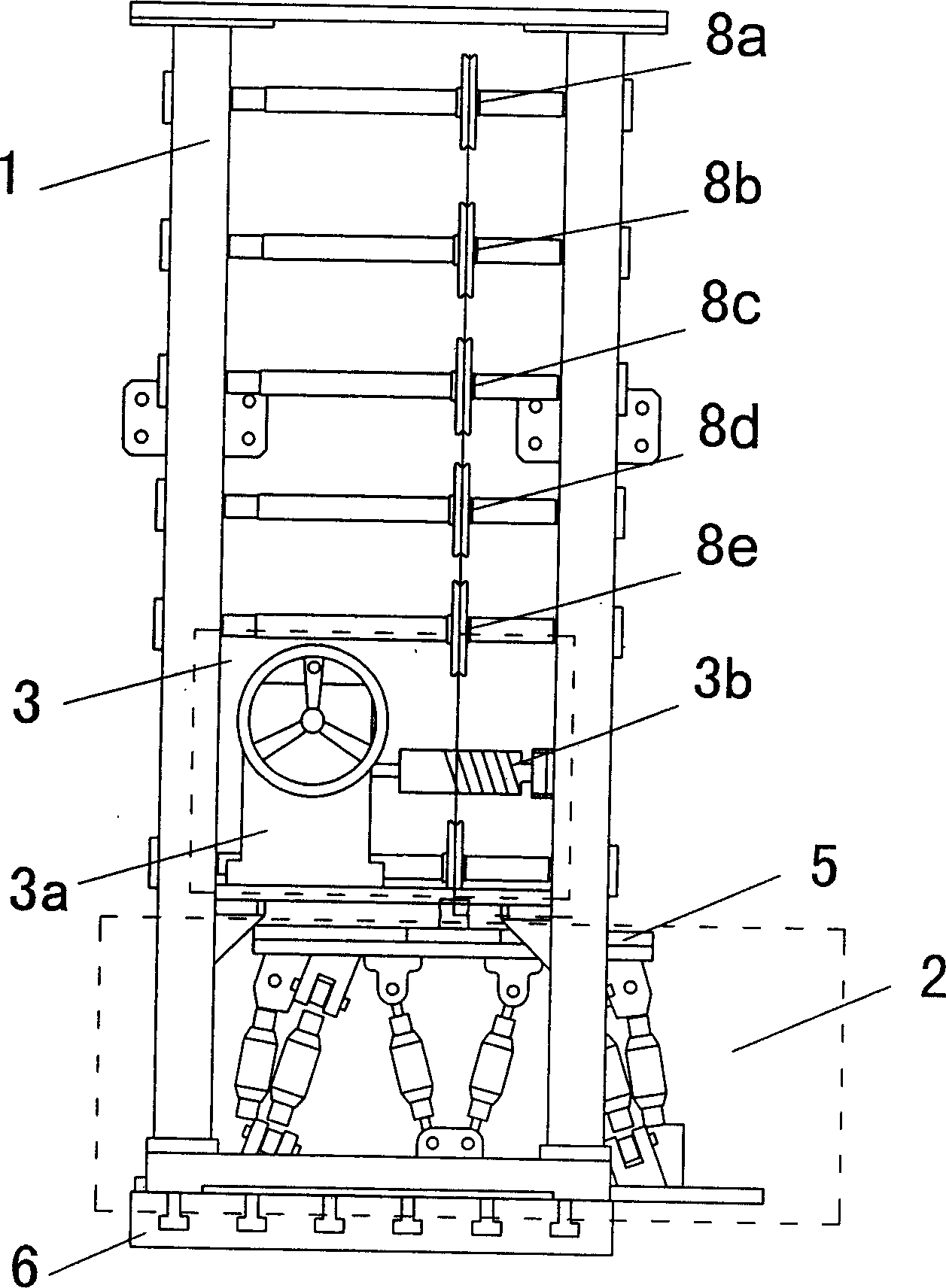
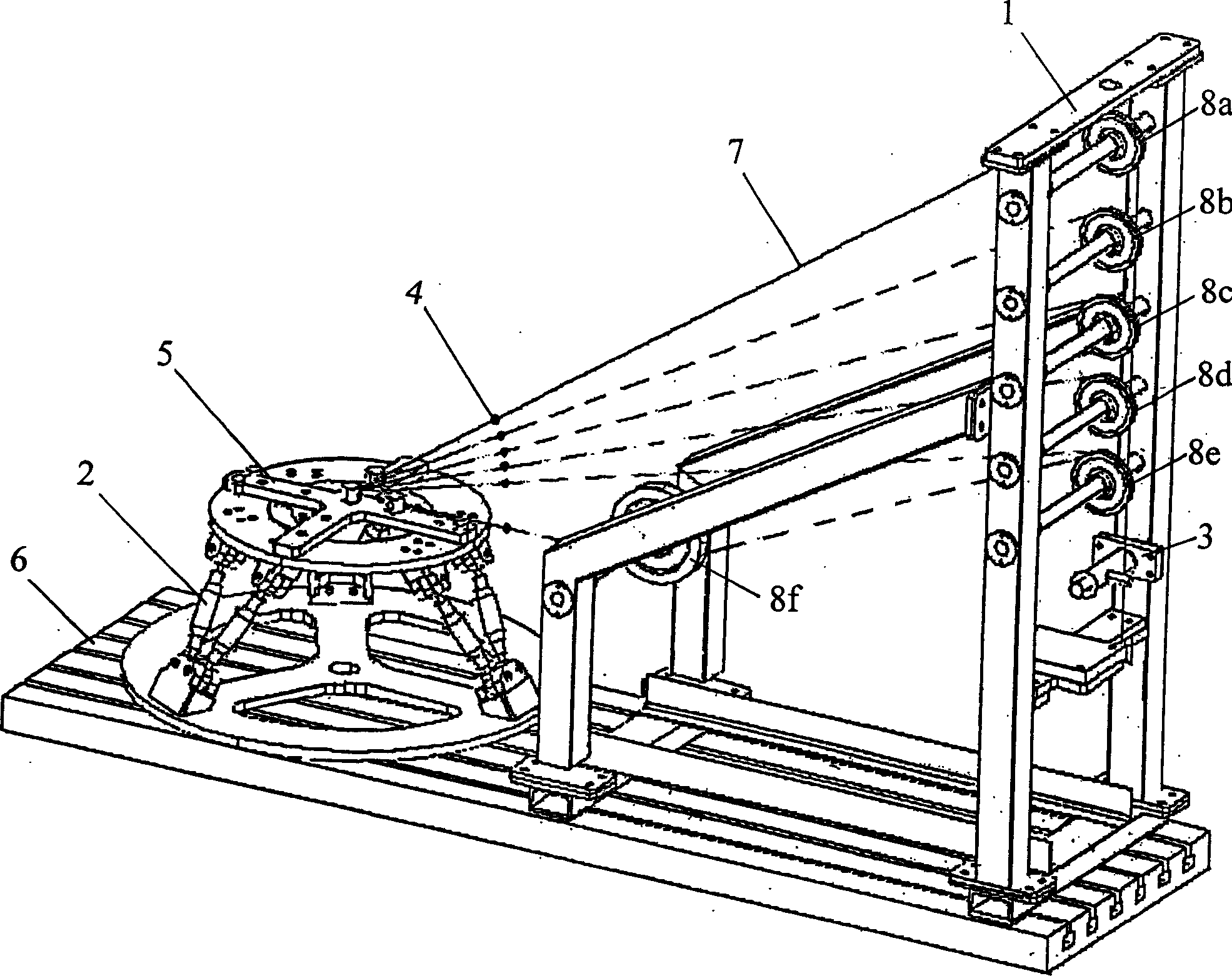
[0015] Such as figure 1 , figure 2 , image 3 As shown, the present invention includes a gantry support frame 1 composed of long and short frames, a loading reducer 3, a standard unidirectional force sensor 4, a loading coordinate cross 5, a calibration device fixing platform 6, a load transmission rope 7 and a pulley block 8; wherein:
[0016] 1) The gantry support frame 1 composed of long and short frames and the parallel six-dimensional force sensor 2 of the loaded object are respectively fixed on the planes at both ends of the fixed platform 6 of the calibration device, and the outer gantry support frame 1 is installed between two vertical beams of the long frame There are five pulleys 8a, 8b, 8c, 8d, 8e; the loading reducer 3 is fixed on the lower end of the pulley block 8 on the long frame of the outer gantry support frame 1; the loading coordi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More