

Multiple robot arm tracking and mirror jog
A manipulator and mirroring technology, applied in the directions of manipulator, program-controlled manipulator, computer control, etc., can solve the problem of coordinate fretting that does not support mirror fretting, and achieve the effect of simplifying teaching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
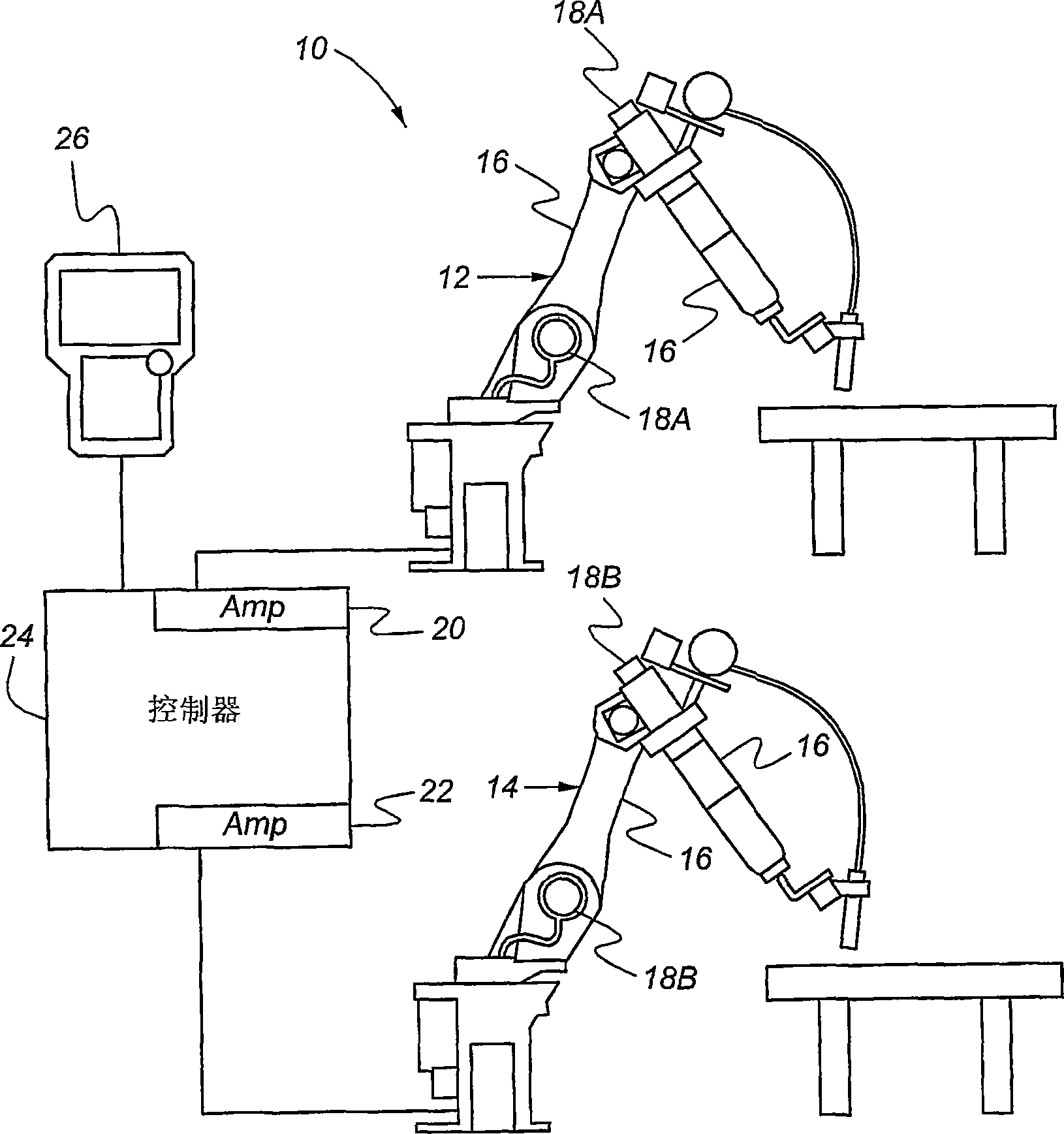
[0021] The present invention is a system 10 and method for jogging multiple industrial robots simultaneously. although figure 1 The system shown includes a lead robot 12 and a follower robot 14, but any number of follower robots may be included. Each robot 12, 14 has at least one manipulator 16 comprising at least one servo motor 18A, 18B for rotating the manipulator about an axis. The servo motor 18A of the first robot 12 is operatively connected to the first set of servo amplifiers 20 , while the servo motor 18B of the second robot 14 is operatively connected to the second set of servo amplifiers 22 . The servo amplifiers 20, 22 are operatively connected to and controlled by a robot controller 24, or each robot 12, 14 may have its own controller, connected in a network to a central or system controller 24.
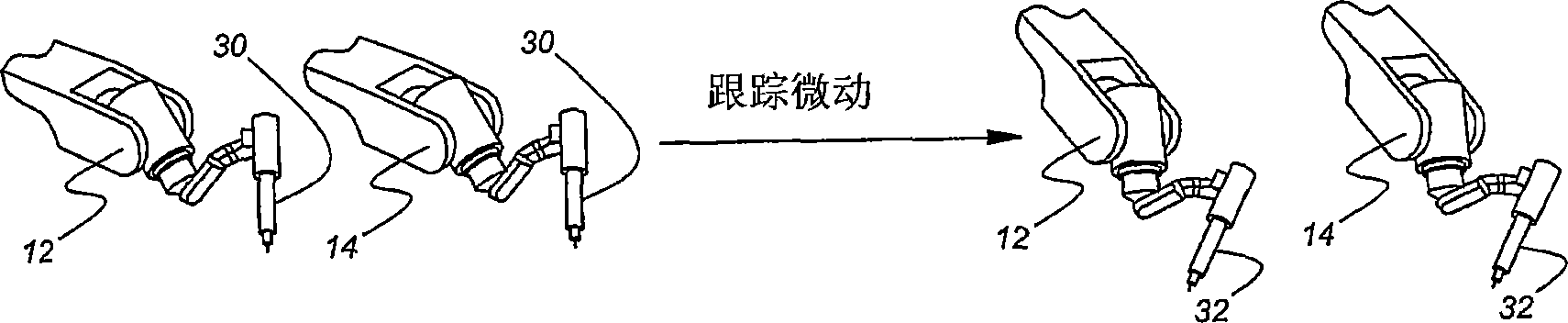
[0022] The present invention allows the robots 12, 14 to move simultaneously and synchronously during manual jogging. Simultaneous movement is achieved by the control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More