

Wheel leg traction type flat curtain cleaning robot
A cleaning robot and traction-type technology, applied in cleaning machinery, manipulators, cleaning floors, etc., can solve problems such as insufficient stability and reliability in the process of overcoming obstacles, inability to adjust attitude, and impact on work performance, and achieve efficient, reliable, automatic cleaning and safety. The effect of high cost and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
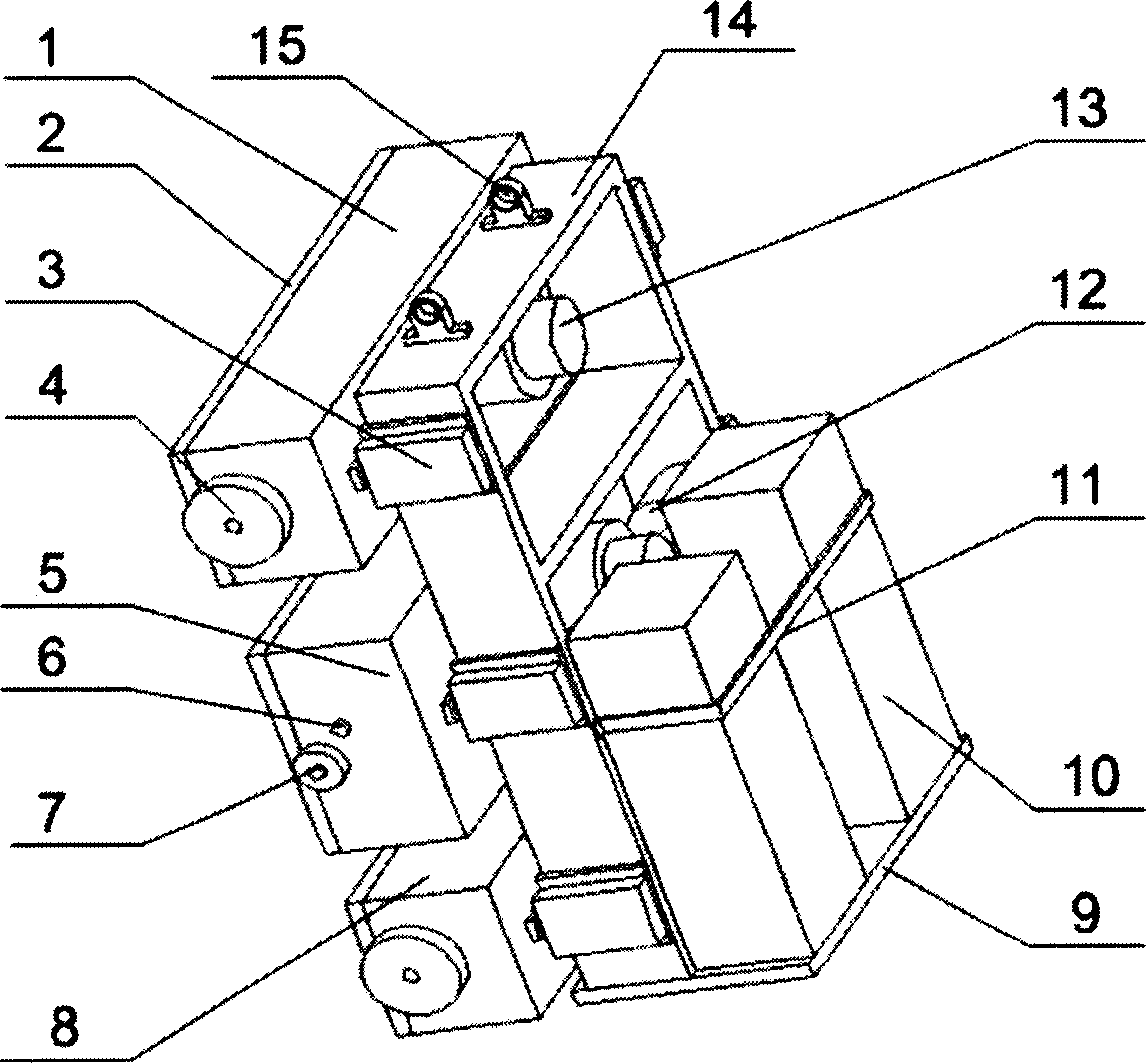
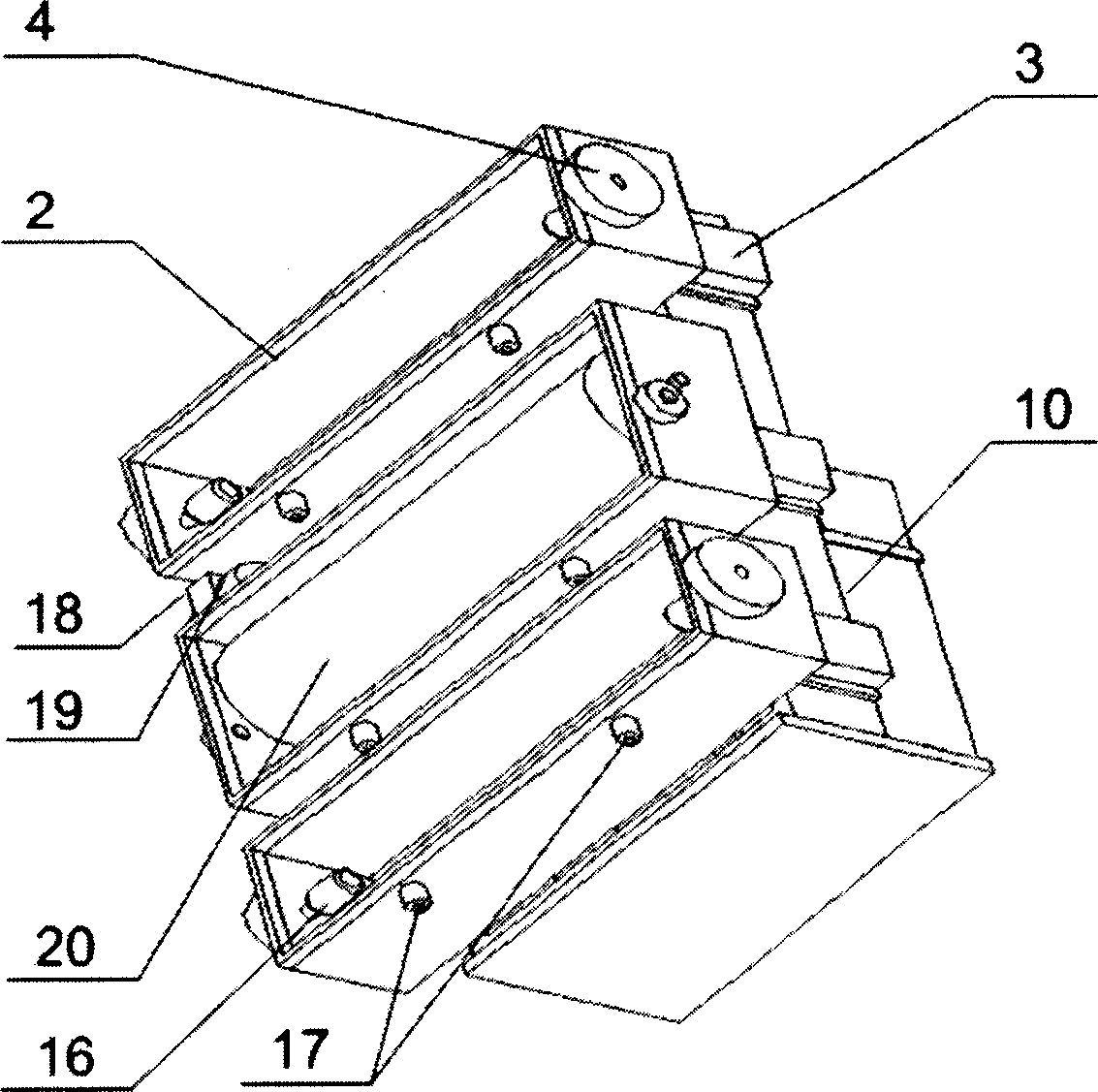
[0020] The structural composition of the cleaning robot of the present invention is as follows: figure 1 with figure 2 shown. The robot relies on the rubber strip sealing device 2 with three suction cups, uses the upper suction cup 1, the middle suction cup 5 and the lower suction cup 8 of the wheel-leg negative pressure suction cup structure, and the telescopic cylinder 3 arranged on the left and right sides of the suction cup to simultaneously or alternately adsorb on the wall, Relying on its own gravity and the traction of the roof hoist to slide up and down to realize wall cleaning and crossing window frame obstacles, and through the driving wheels 4 on the left and right outer sides of the upper suction cup 1 and the lower suction cup 8, the robot can clean and overcome obstacles. posture adjustment.
[0021] The cleaning robot is com...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More