

Manipulator having cross-in/cross-out and retardation controller
A deceleration control and control device technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of reduced speed, large movement vibration, and difficult vibration control, etc., to achieve improved deceleration effect, good coordination accuracy, and high stop accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] With reference to accompanying drawing, the present invention will be described in detail below:
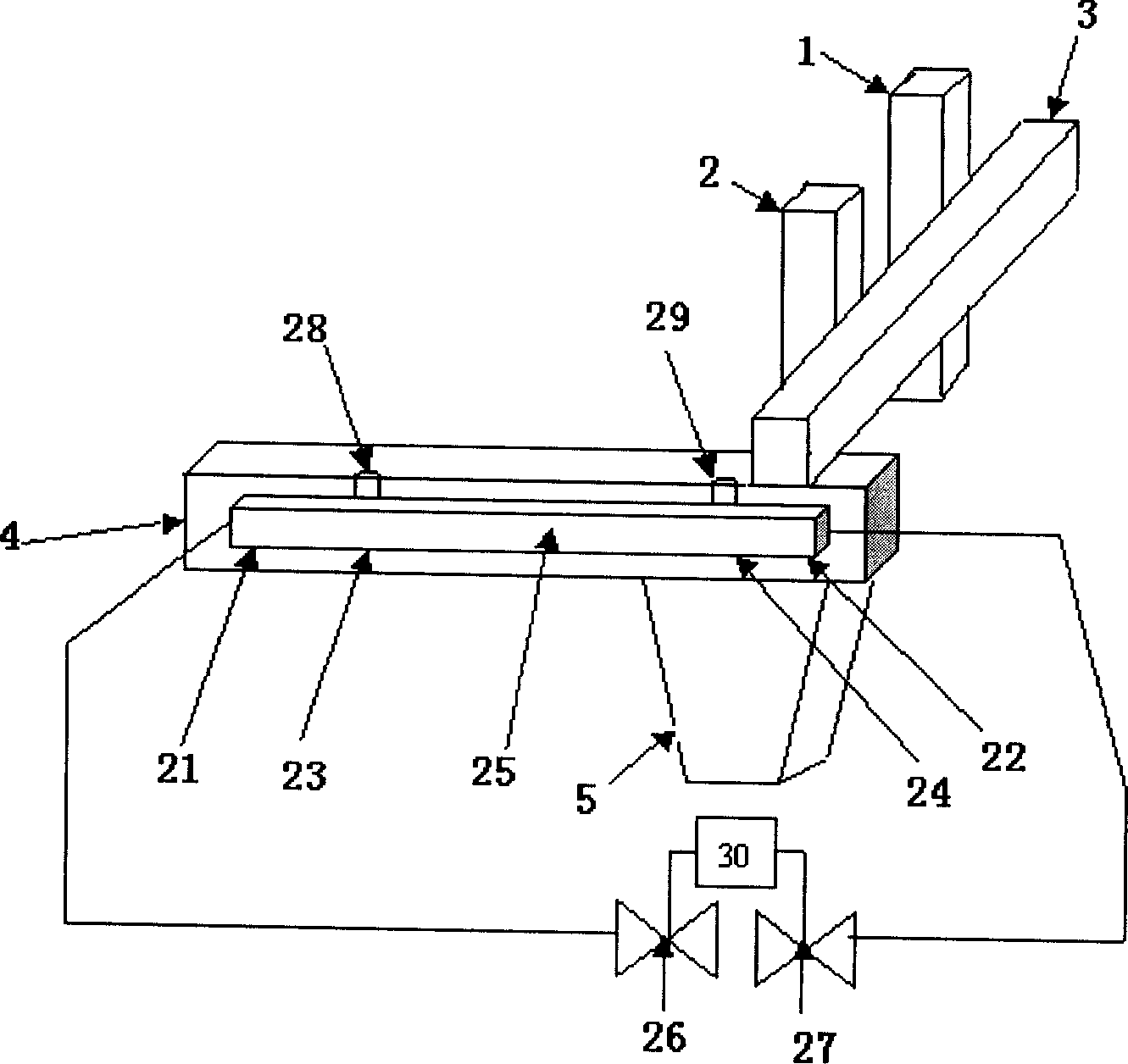
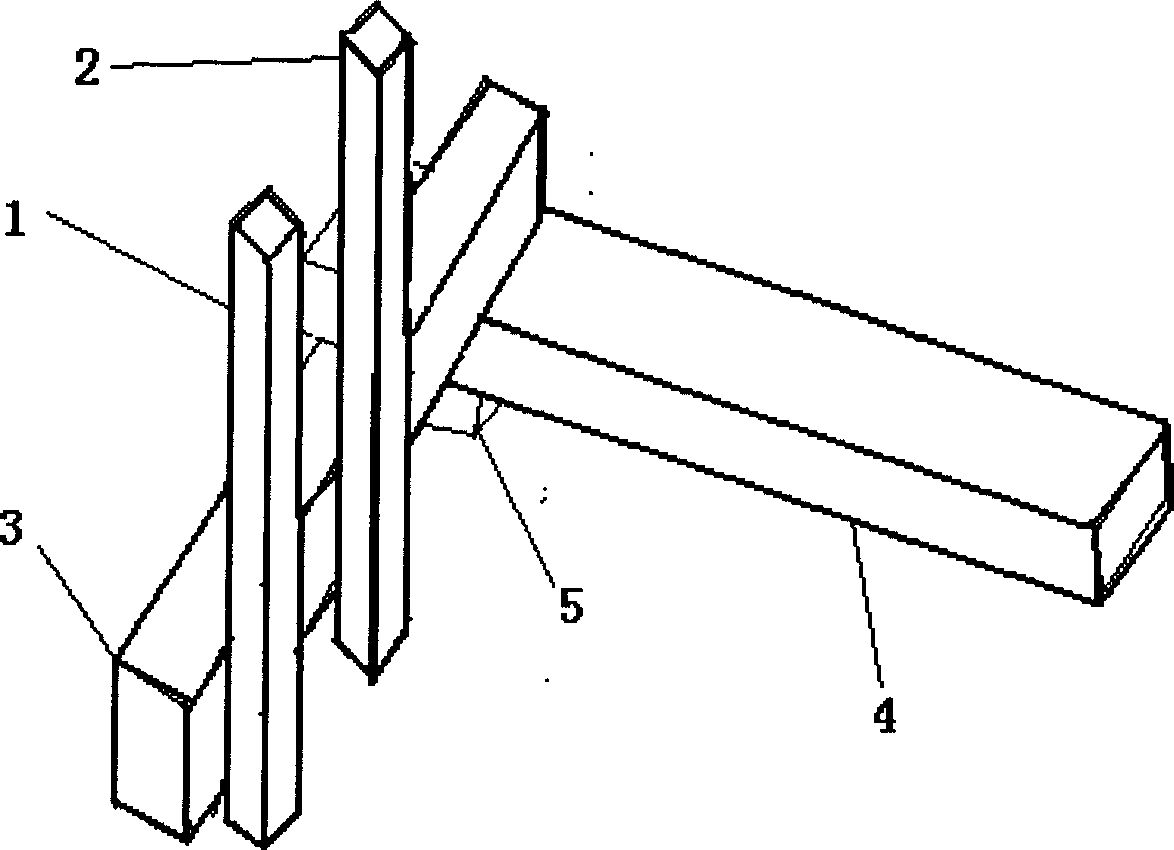
[0014] A manipulator with a cross-in and cross-out deceleration control device, with two retrieving arms, the main arm 1 and the auxiliary arm 2, the main arm 1 and the auxiliary arm 2 are installed on the drawing beam 3, and the drawing beam 3 is installed on the cross beam 4 above. The main arm 1 and the auxiliary arm 2 can move up and down, and they can also move forward and backward on the drawing beam 3. The drawing beam 3 can move in and out horizontally on the beam 4, so that the manipulator has X, Y , the degree of freedom movement in the Z direction, all movements are controlled by the air pressure solenoid valve through the cylinder 25 and driven by air pressure. The base 5 of the manipulator is installed on the injection molding machine, and the base 5 and the beam 4 are fixed together to support the whole manipulator. The cross-in and cross-out action is move...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More