

Miniature bone-attached surgical robot
a robot and surgical technology, applied in the field of robotic devices, can solve the problems of limited operating room space, long recovery time, high risk of infection for patients, etc., and achieve the effect of high efficiency and accura
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
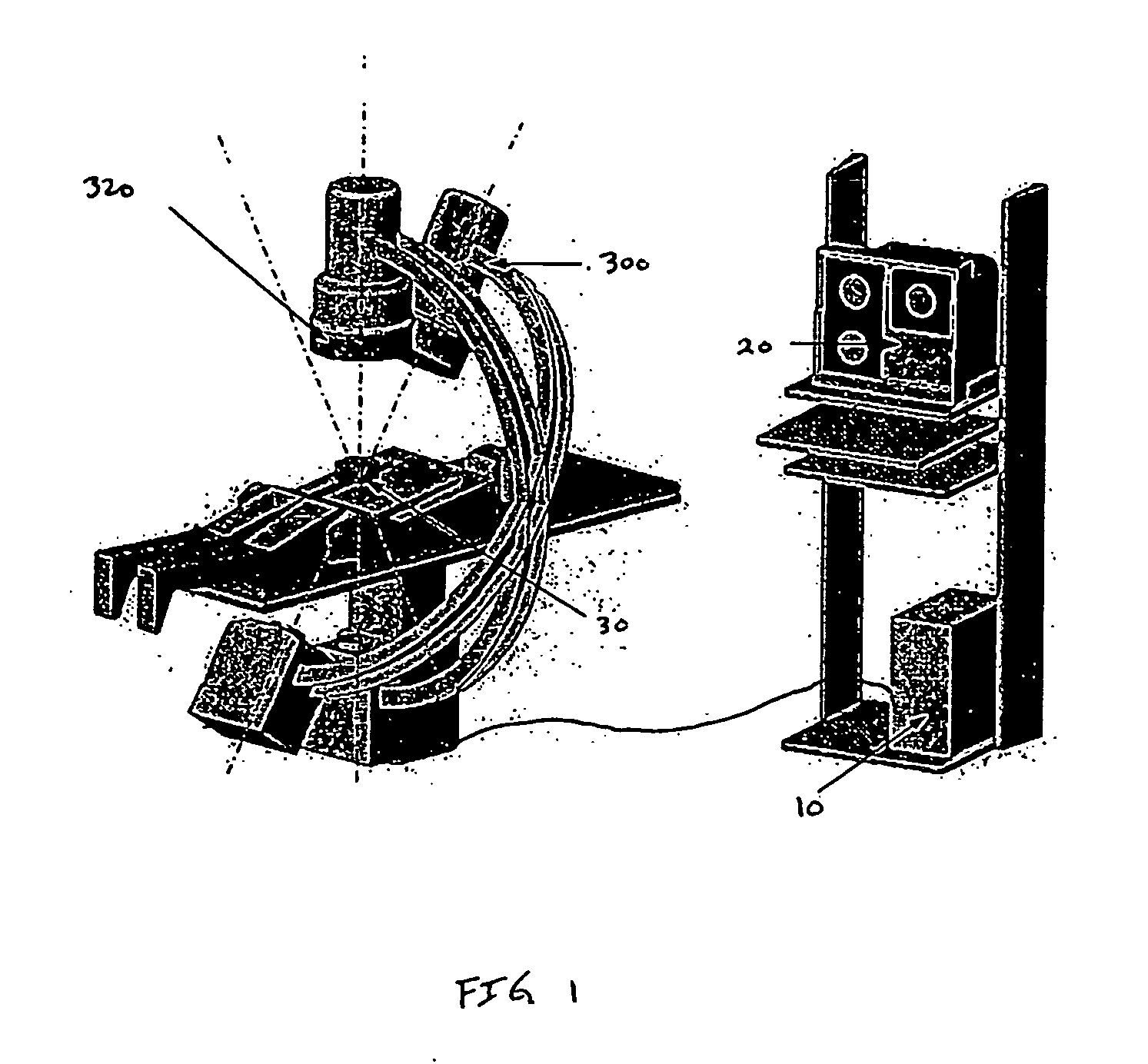
[0022] Referring to the illustrations and particularly to FIG. 1 it can be seen that a preferred embodiment of the present invention generally includes an image guided, robot assisted, surgical system. Included in this system generally, as shown in FIG. 1, is a bone attached surgical robot 30; a control unit 10 that matches data from CT scans and C-arm images to locate robot 30 on the patient's bone and allows a surgeon to control robot 30, through the use of a mouse, joystick, touch screen, or the like; and video display 20. Control unit 10 generally includes a cpu and user interface communicating with display 20 and robot 30.
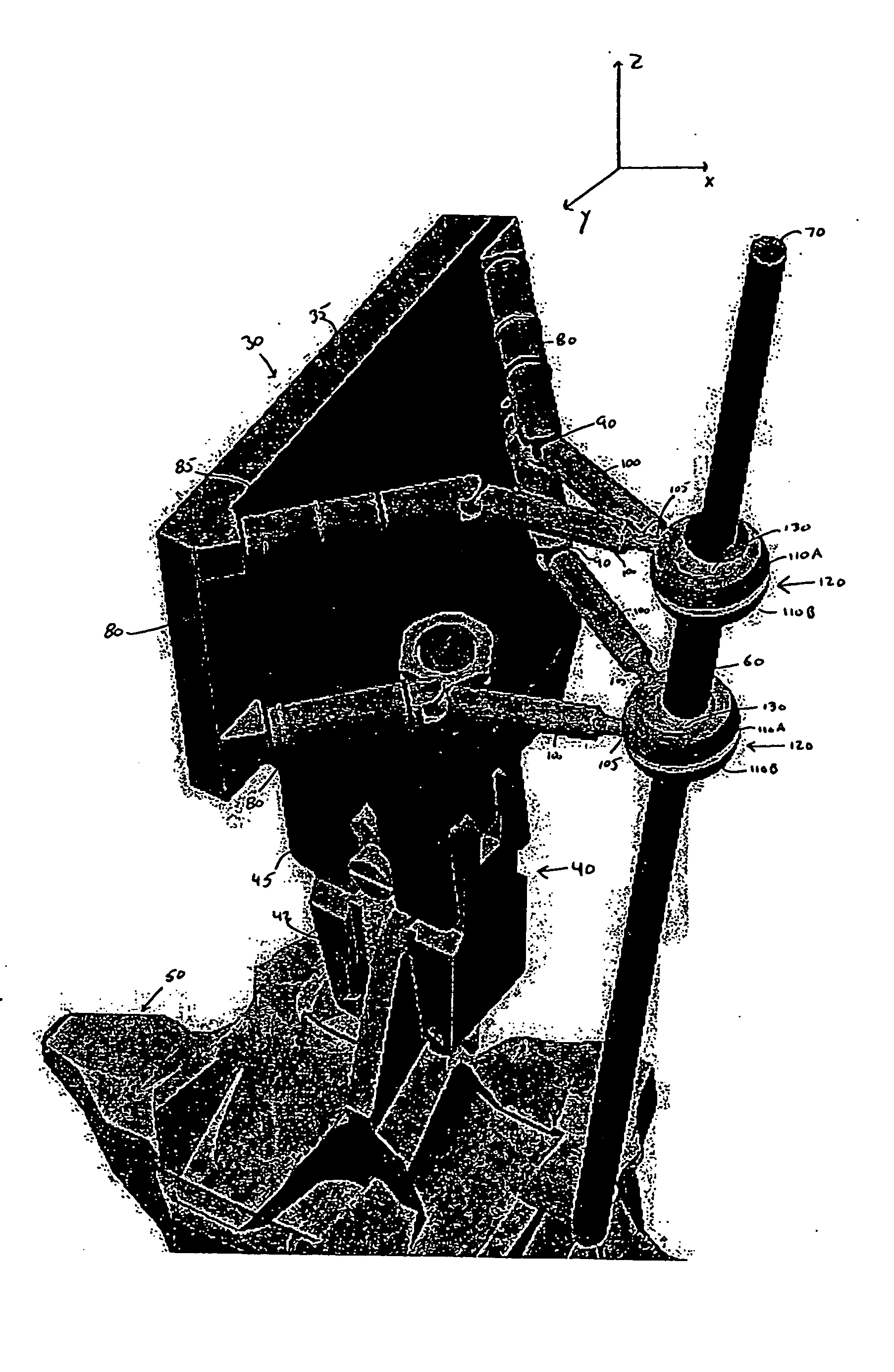
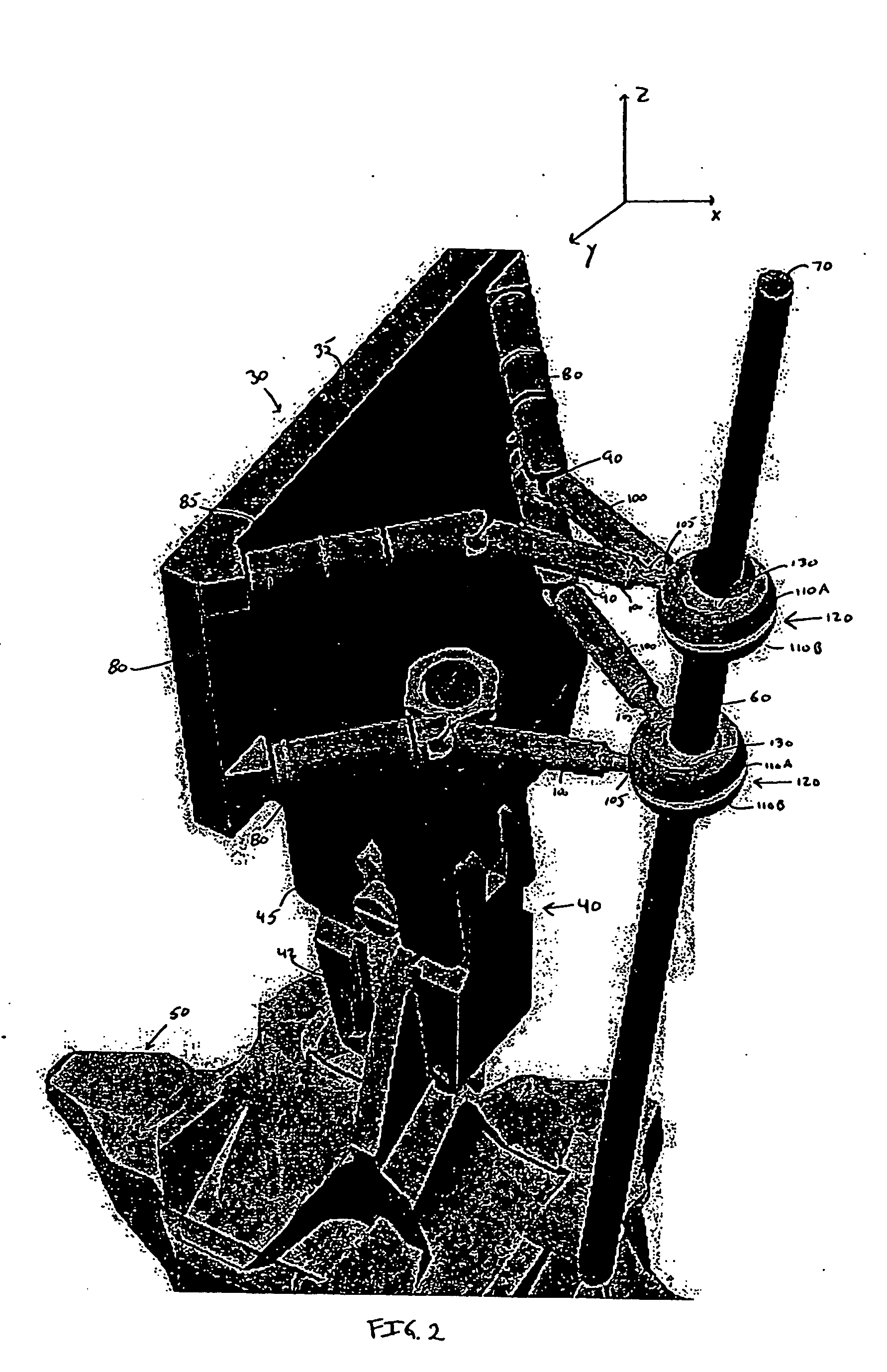
[0023]FIG. 2 illustrates robot 30 according to one embodiment of the present invention attached with clamp 40 to vertebra 50. Robot 30 aligns sleeve 60 through which surgical tool 70 such as a screwdriver, drill bit, Kirschner wire (K-wire), or the like can be inserted and precisely aligned with a site requiring a surgical procedure and thus, the operation ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More