

Surgical manipulator for a telerobotic system
a telerobotic system and manipulator technology, applied in the field of surgical manipulators, can solve the problem that the actuation force applied by the drive motor will not generate any effective side loads on the instrument, and achieve the effect of convenient sterilization and convenient design of the telerobotic system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
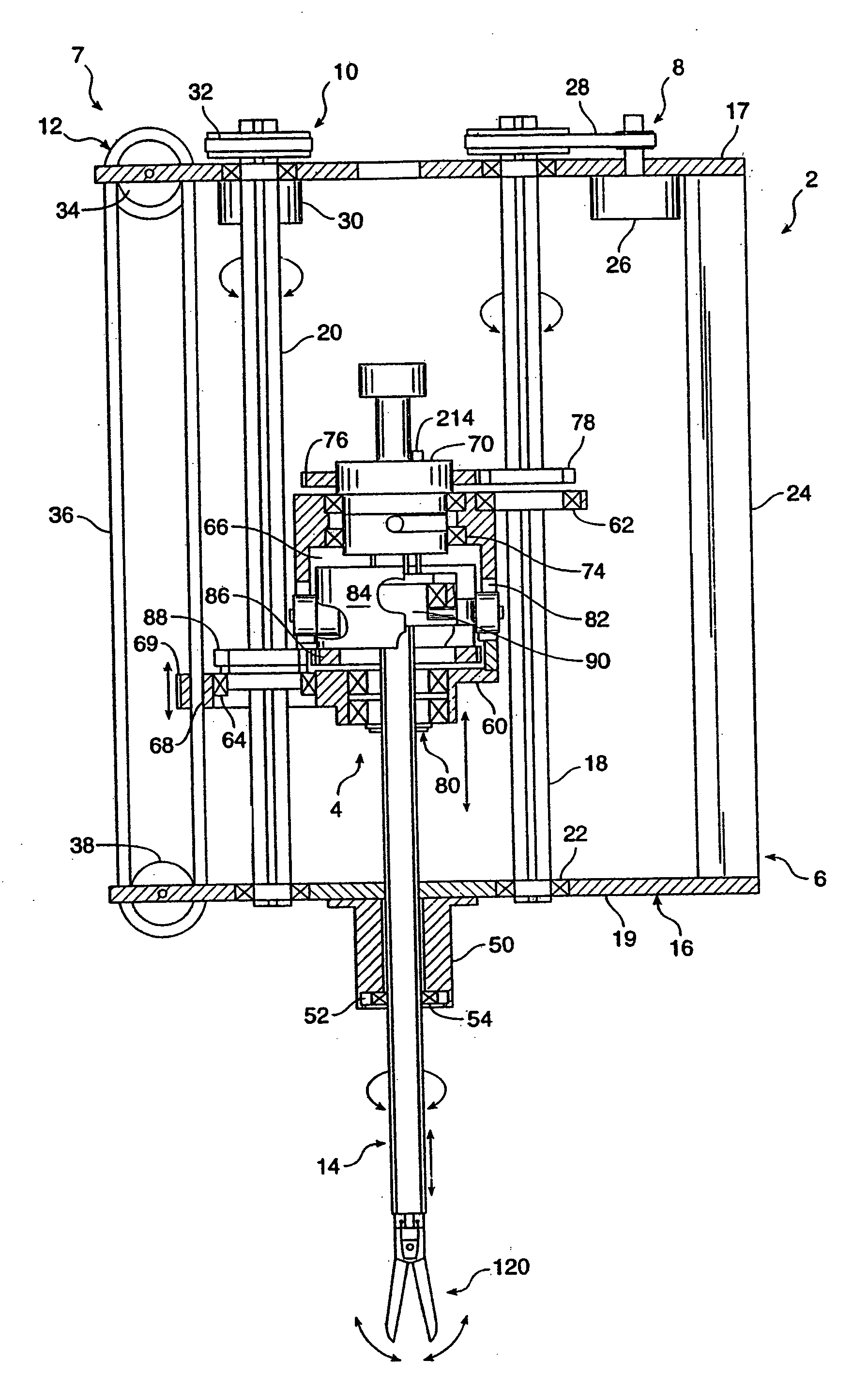
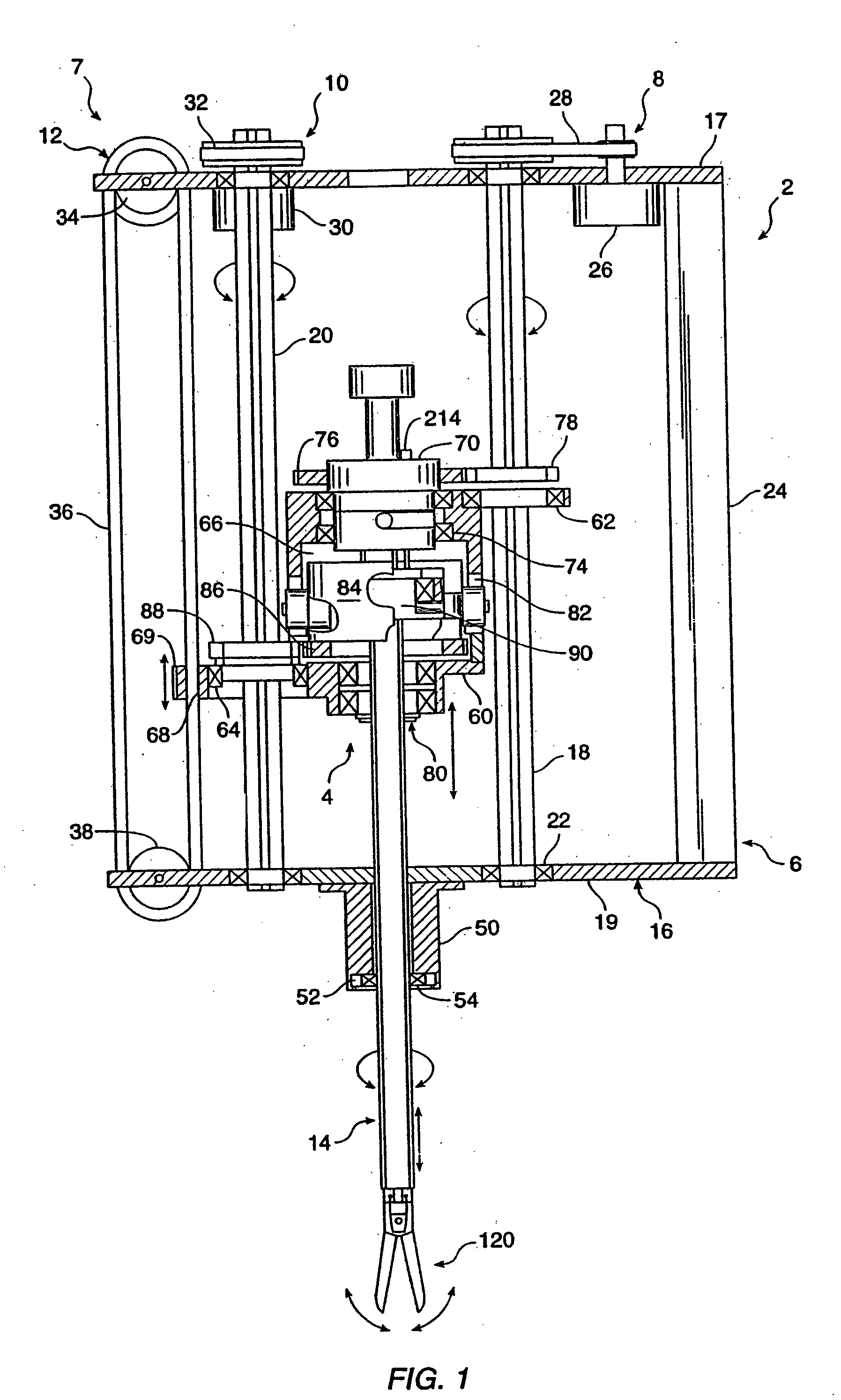
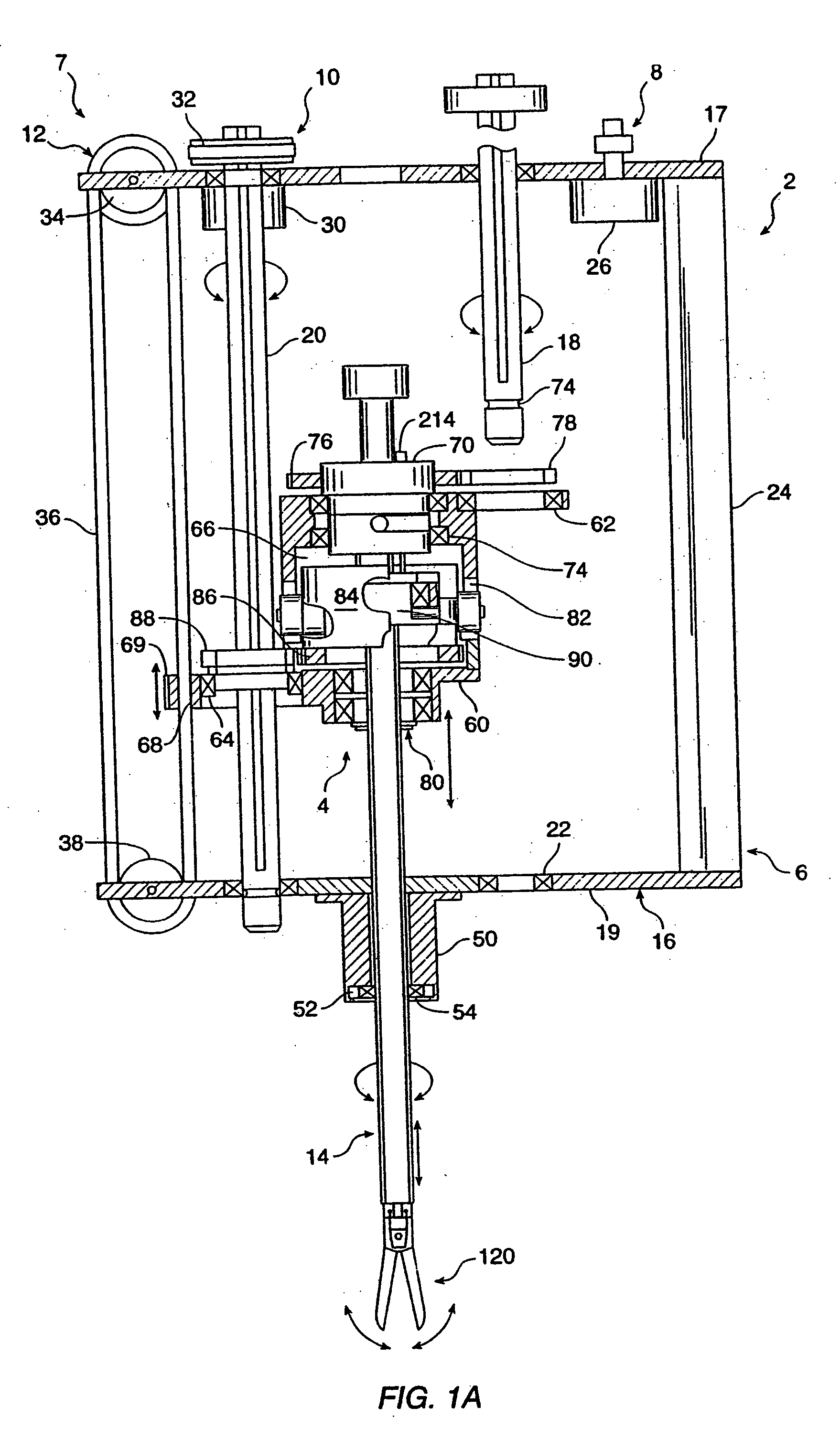
[0024] Referring to the drawings in detail, wherein like numerals indicate like elements, a manipulator assembly 2 is illustrated according to the principles of the invention. Manipulator assembly 2 generally includes an instrument holder 4 removably mounted to a base 6 and a drive assembly 7 for manipulating a surgical instrument 14 releasably coupled to instrument holder 4.
[0025] Referring to FIG. 1, base 6 comprises a frame 16 having proximal and distal elongate support members 17, 19 and first and second ball-spline shafts 18, 20 rotatably coupled to support members 17, 19 via bearings 22. Frame 16 further includes a support bracket 24 for attaching manipulator assembly 2 to a remote center positioner 300, as discussed in more detail below (see FIG. 9). Drive assembly 7 comprises first, second and third drives 8, 10, 12, which are mounted to frame 16 and configured to provide three degrees of freedom to surgical instrument 14. In the preferred embodiment, first drive 8 rotates ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More