

System and method for detection and tracking of targets
a target detection and target technology, applied in the field of active and passive sensor applications, can solve the problems of only using sophisticated sensor systems, cost and difficulty in implementation, and passive sensor systems cannot decide on the range and velocity of intercepted transmitters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
first embodiment
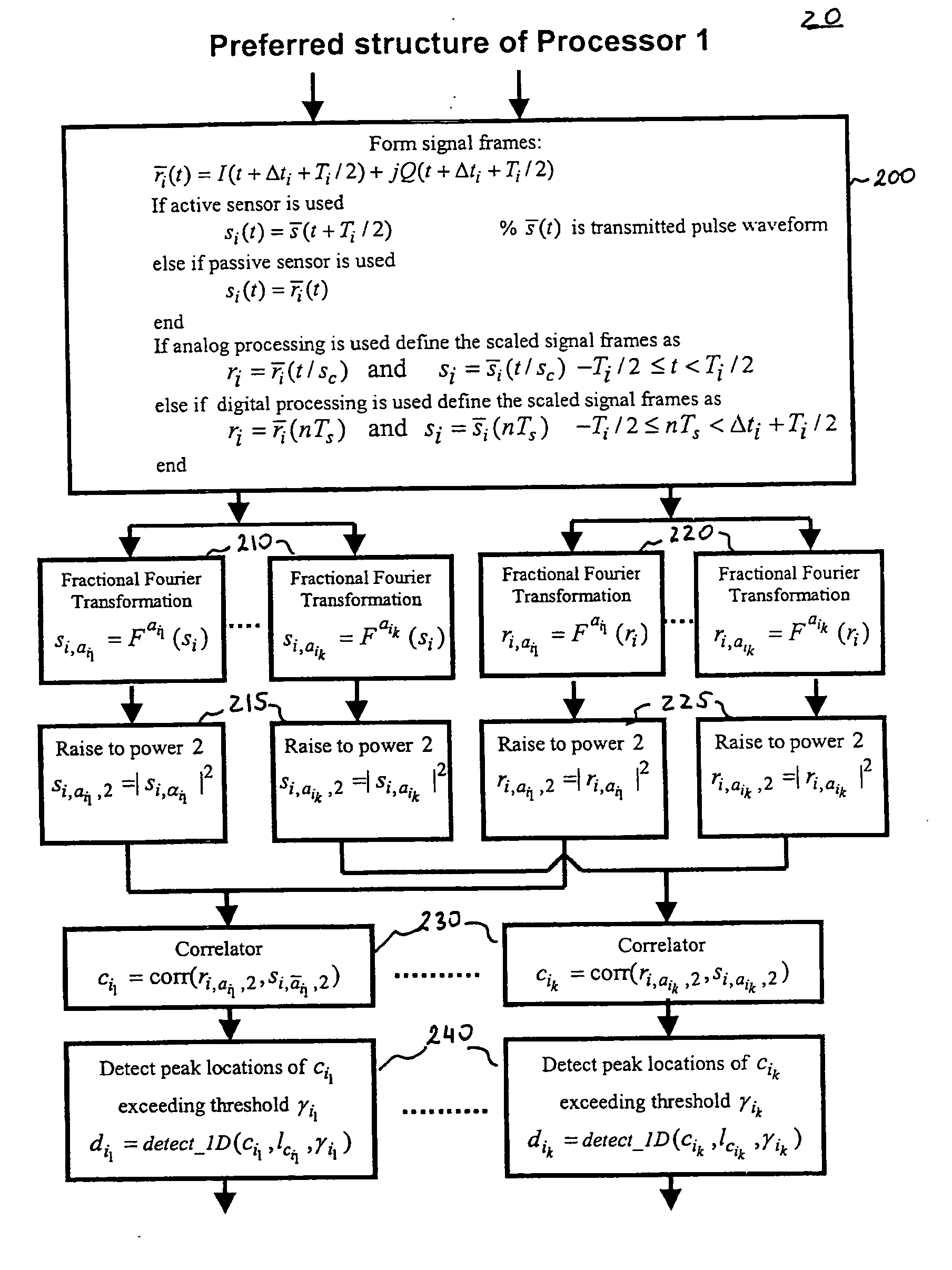
[0069] The preferred configuration of the first embodiment shown in FIG. 9 is designed for both the active and passive sensor systems. In the case of active sensor applications, si in block FIG. 9 is set to be the transmitted signal delayed with Ti / 2. In the case of passive sensor applications, si in block FIG. 9 is set to be the i-th received signal frame. Then, si is also transformed into multiple fractional Fourier domains In the preferred configuration, the orders of the fractional Fourier transformations are chosen to be the same as the orders used in the fractional Fourier transformations applied on the received signal frame in 220. Therefore, in passive sensor applications, the fractional Fourier transformations of si are identical to those of ri. Hence, it is not necessary to compute the fractional Fourier transformations of si. In the case of active sensor applications with a digital receiver, such a computational efficiency can be achieved by computing the required fractio...
second embodiment
[0081] In the case of multiple peaks detected on individual correlations, in accordance with the invention the corresponding peak locations of the Ari,si(τ, v). can be found in many alternative methods. To introduce some of these alternatives, a simple case of detection of two scattering objects on two different projections is shown in FIG. 22. The potential locations of the peaks in Ari,si(τ,v) are at the four intersections shown in FIG. 22. The decision in the actual locations can be based on computing values of Ari,si(τ,v) around these four intersection points by using the algorithm given in Appendix B. This method is shown as part of the preferred structure of the second embodiment in FIG. 10. If there is a significant difference between the magnitudes of the detected peaks on each correlation, in accordance with a second alternative method, the location of the peaks in Ari,si(τ,v) can be estimated as the intersection of those perpendicular lines which correspond to the similar ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More