

Method for measuring synthetic aperture sonar motion error and underwater acoustic channel phase error
A synthetic aperture sonar, motion error technology, applied in measurement devices, re-radiation of sound waves, radio wave measurement systems, etc., can solve problems such as increasing the complexity of equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
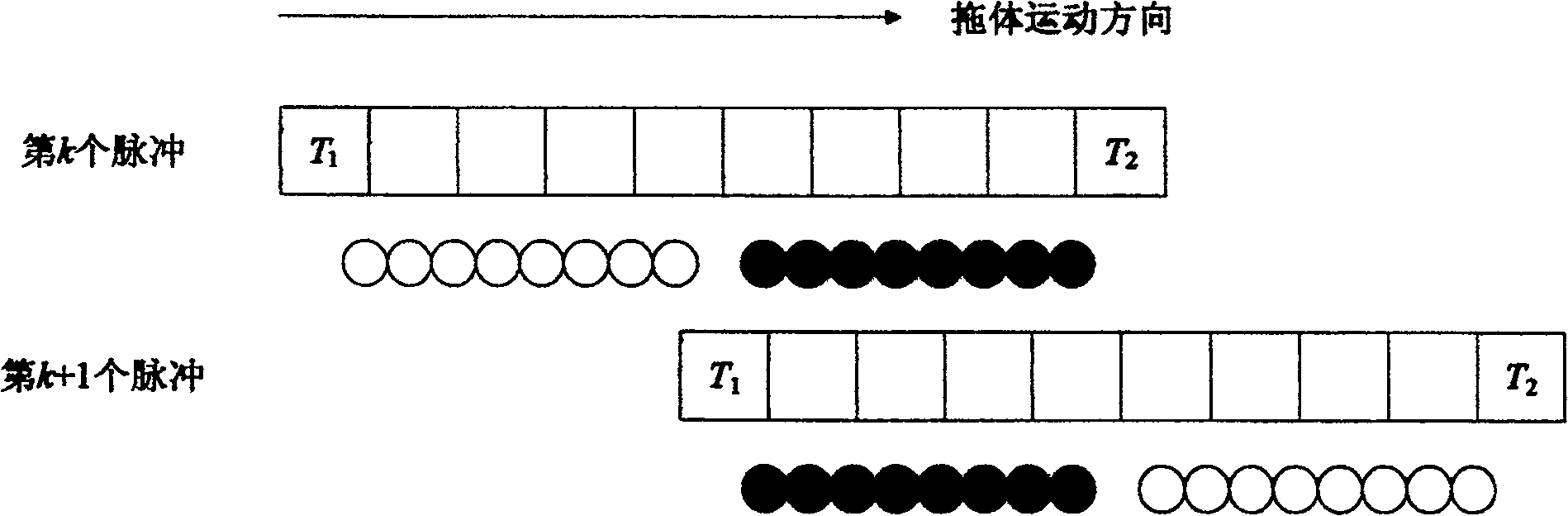
[0040] Example 1: see figure 2 The sonar array of this embodiment is composed of 2 transmitting array elements and 8 receiving array elements, and the transmitting array elements send co-frequency orthogonal signals in different pulse periods. In the previous pulse period, the transmitting array element sends out the same frequency orthogonal signal T 1 (k, t) and T 2 (k, t), after being reflected by the target, the echo signal received by the receiving array element is S i,1 (k, t) and S i,2 (k, t), after pulse compression, the signal is S comi,1 (k, t) and S comi,2 (k, t). The two groups of target reflection echoes drawn in the figure have 16 phase centers respectively, which are received at the midpoint of the connection between the 8 receiving array elements and the two transmitting array elements. When the next pulse period comes, the two transmitting array elements respectively emit signal waveform T 1 (k+1, t) and T 2 (k+1,t), due to the movement of the sonar carrier, the ...
Embodiment 2
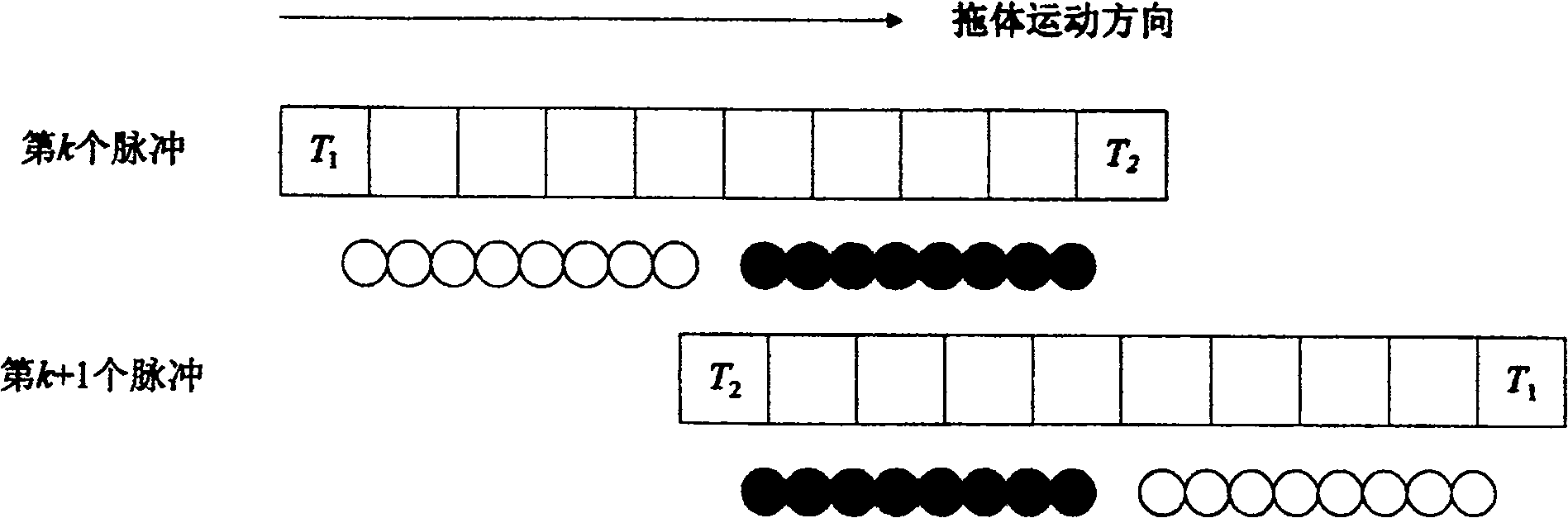
[0041] Example 2: see image 3 , The transmitting array element of this embodiment sends co-frequency orthogonal signals in turn in different pulse periods. In the previous pulse period, the transmitting array element sends out the same frequency orthogonal signal T 1 (k, t) and T 2 (k, t), after being reflected by the target, the receiving array element receives the echo signal S i,1 (k, t) and S i,2 (k, t). The two groups of target reflection echoes drawn in the figure are received by 16 phase centers respectively. In the next pulse, the two emission arrays respectively emit T 2 (k+1, t) and T 1 (k+1,t), due to the movement of the sonar carrier, the phase center 1-8 has reached the position of the phase center 9-16 in the previous cycle. In this cycle, the receiving element receives the echo signal S i,2 (k+1, t) and S i,1 (k+1, t). Because S i,2 (k, t) and S i,2 (k+1, t) is the echo signal received by the overlapping phase center, and they are the echo of the same transmitted s...
Embodiment 3
[0042] Example 3: See Figure 4 The sonar array in this embodiment is composed of 9 array elements, of which 3 array elements are used as transmitting array elements and receiving array elements, and 6 array elements can only work in the receiving state. The transmitting array element arbitrarily sends the same frequency orthogonal signal in different pulse periods. In the previous pulse period, the transmitting array element sends out the same frequency orthogonal signal T 1 (k, t), T 2 (k, t) and T 3 (k, t), after being reflected by the target, the receiving array element receives the echo signal S i,1 (k, t), S i,2 (k, t) and S i,3 (k, t), after pulse compression, the signal is S comi,1 (k, t), S comi,2 (k, t) and S comi,3 (k, t). The figure shows that the target reflected echo is received by 17 phase centers. The next pulse three emission arrays respectively emit T e1 (k+1, t), T e2 (k+1, t) and T e3 (k+1, t), (e1≠e2≠e3 and e1, e2, e3ε{1, 2, 3}). Due to the movement of the son...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More