

Walking mechanism of dynamoelectric type pipeline robot
A pipeline robot and traveling mechanism technology, applied in the direction of electromechanical devices, electrical components, electric components, etc., can solve complex mechanism problems, mechanical failures and other problems, and achieve the effect of reducing eddy current, reducing heat generation, and saving mechanism layout space.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
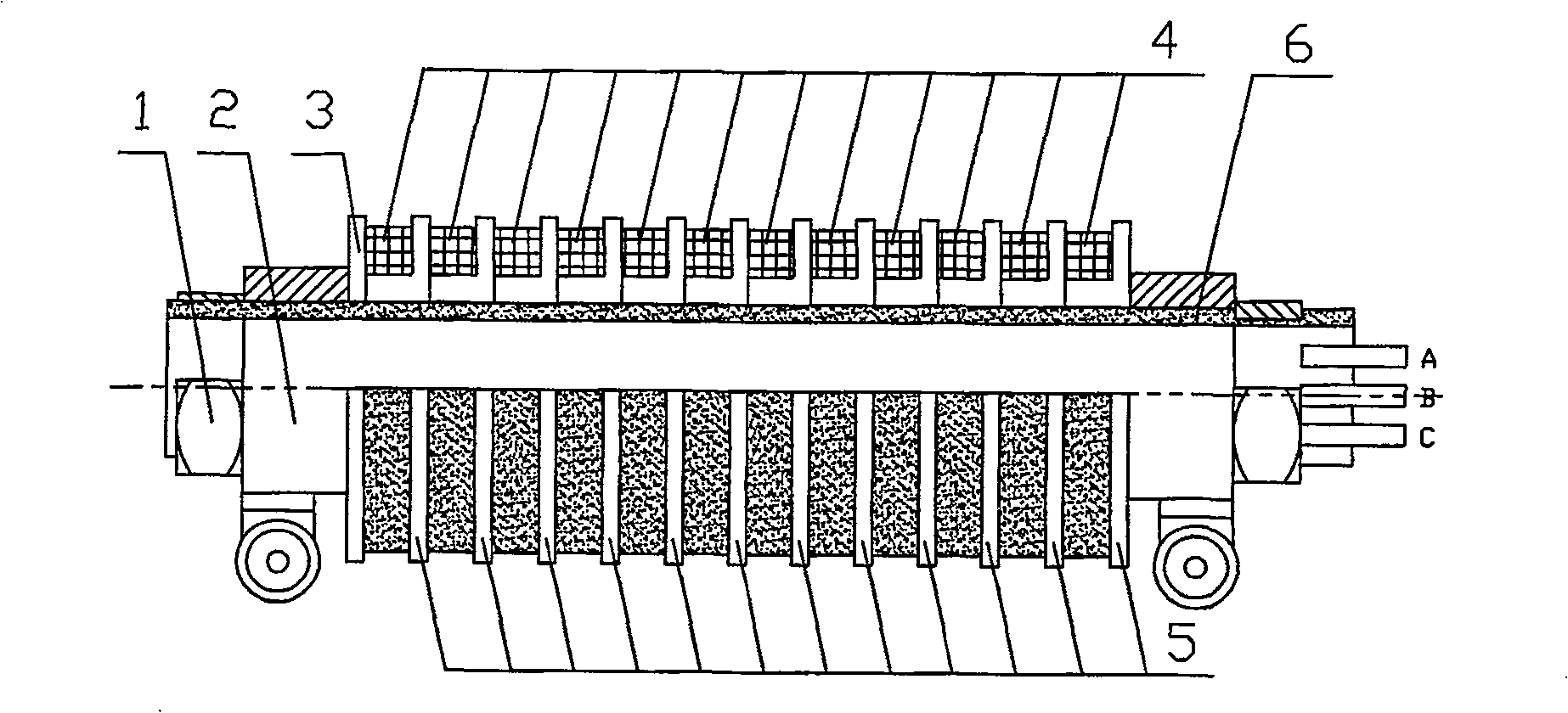
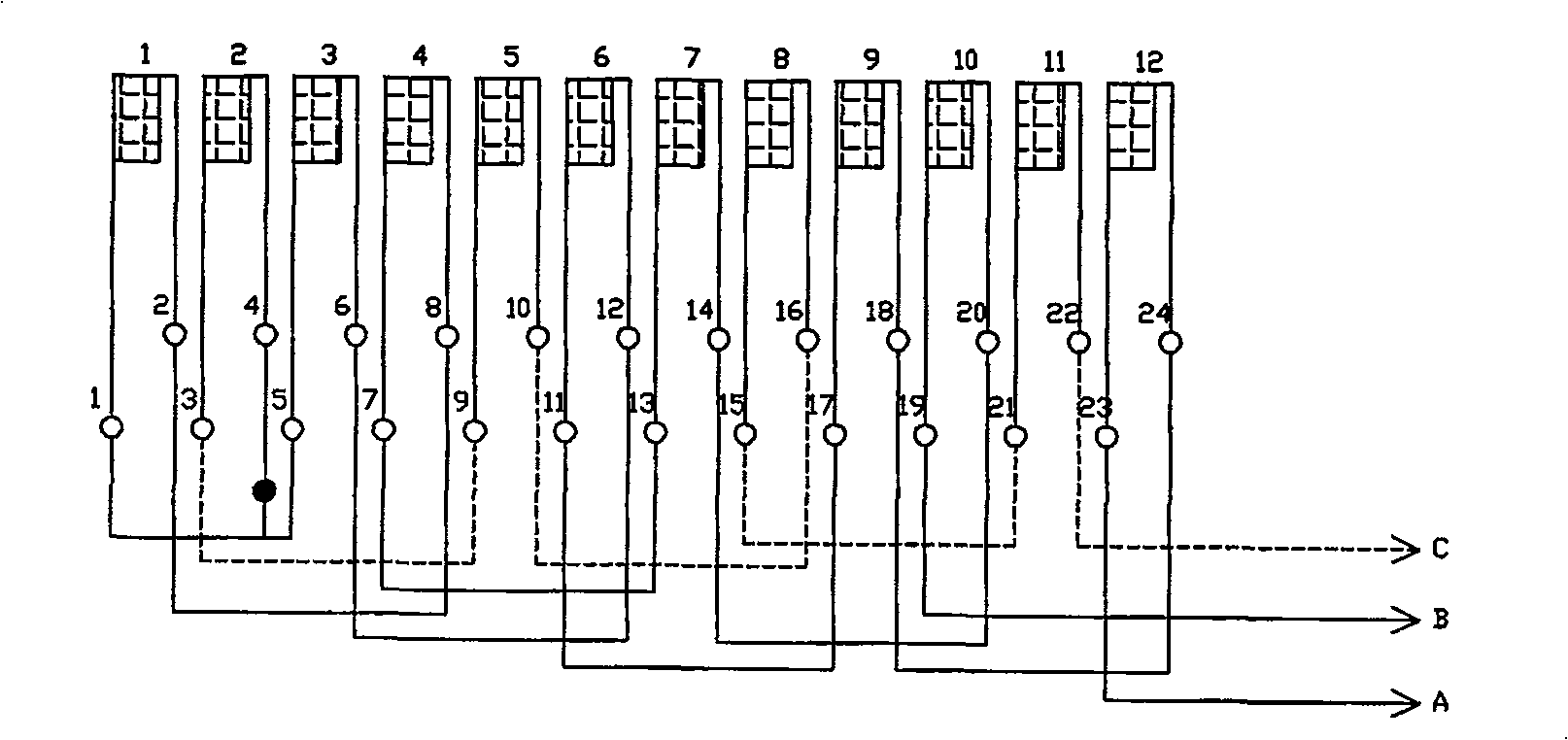
[0020] The walking mechanism of the pipeline robot that removes the copper stains and nylon stains left on the inner surface of the barrel of a self-propelled artillery after firing can provide it with driving force. First, the running mechanism is used as the primary side, and the pipeline wall is used as the secondary side. The pipeline and the running mechanism together constitute a linear motor, and 12 groups of coils are connected into three phases of A, B, and C. All the wiring is put into the inner tube 6, and the The three phases drawn out are respectively connected to the three terminals of A, B and C. It consists of thin nut washer set 1, guide wheel assembly 2, end cover 3, coil 4, rack 5 and inner tube 6. Coil 4 and The number of racks 5 is 12, and the 12 coils 4 are sequentially separated and superimposed on the inner tube 6 by the end cover 3 and the 12 racks 5, and the two ends are covered with guide wheel assemblies 2, and finally the thin coils at both ends Nu...
Embodiment approach 2
[0022] The walking mechanism of the pipeline robot is used to dredge the solid crystalline particles with naphthalene in the pipeline for transporting natural gas. A pipeline for transporting natural gas with a diameter of 180mm, the number of coils 4 and racks 5 in the walking mechanism of a pipeline robot is 15, and the 15 coils 4 are sequentially separated and stacked by the end cover 3 and 15 racks 5 On pipe 6, others are the same as Embodiment 1.
Embodiment approach 3
[0024] The walking mechanism of the pipeline robot is used for dredging the sediments with impurities in the oil in the pipelines transporting oil. 200mm in diameter pipeline for transporting petroleum, the number of coils 4 and racks 5 in the walking mechanism of a pipeline robot is 18, and the 18 coils 4 are separated and superimposed by the end cover 3 and the 18 racks 5 in sequence. On pipe 6, others are the same as Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More