

Underwater mechanical arm telescopic joint for strong operation type underwater robot
A technology of underwater robots and underwater manipulators, which is applied in the direction of manipulators, claw arms, manufacturing tools, etc., can solve the problems of increased load-bearing capacity, increased telescopic distance, and inability to retract telescopic sleeves, etc., to achieve high load-bearing capacity and flexible The effect of long distance and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in further detail below in conjunction with the embodiments and accompanying drawings.
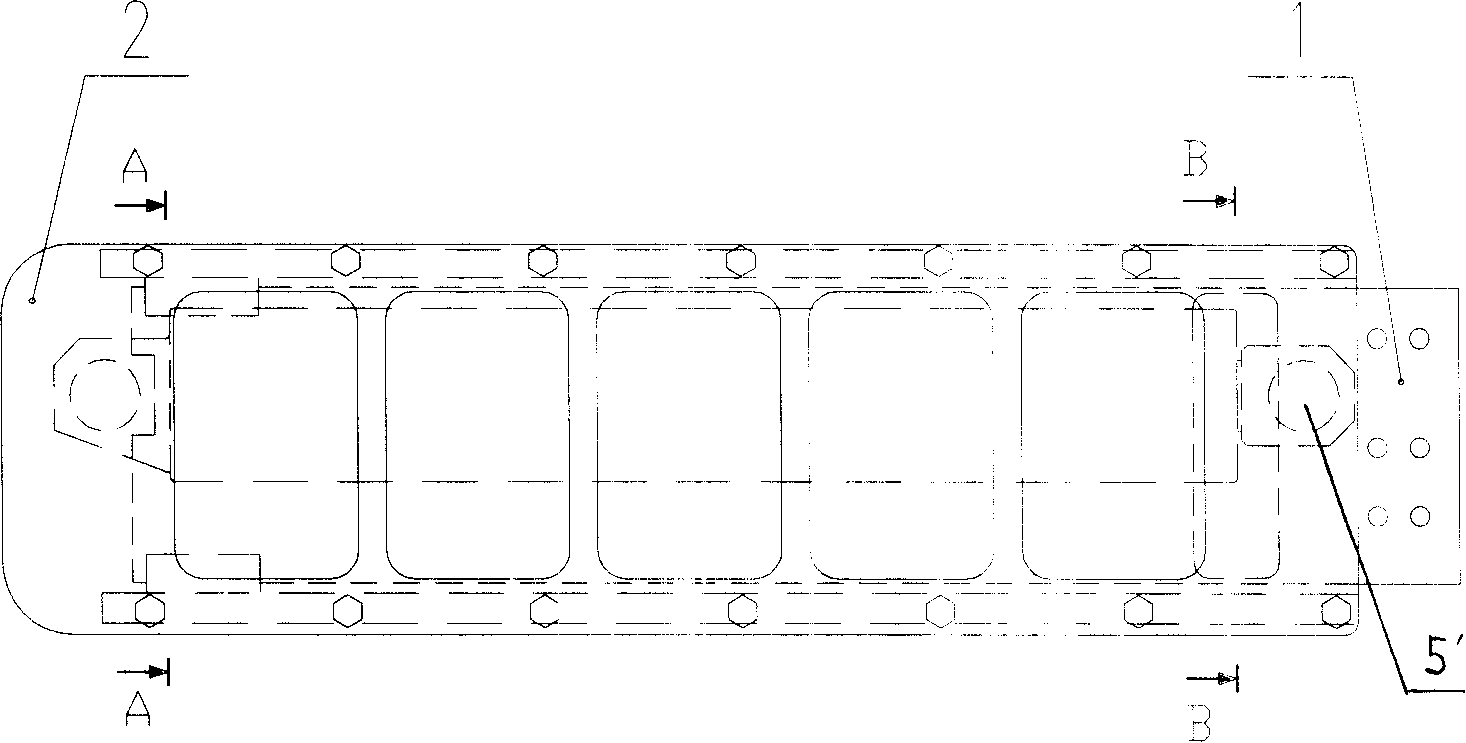
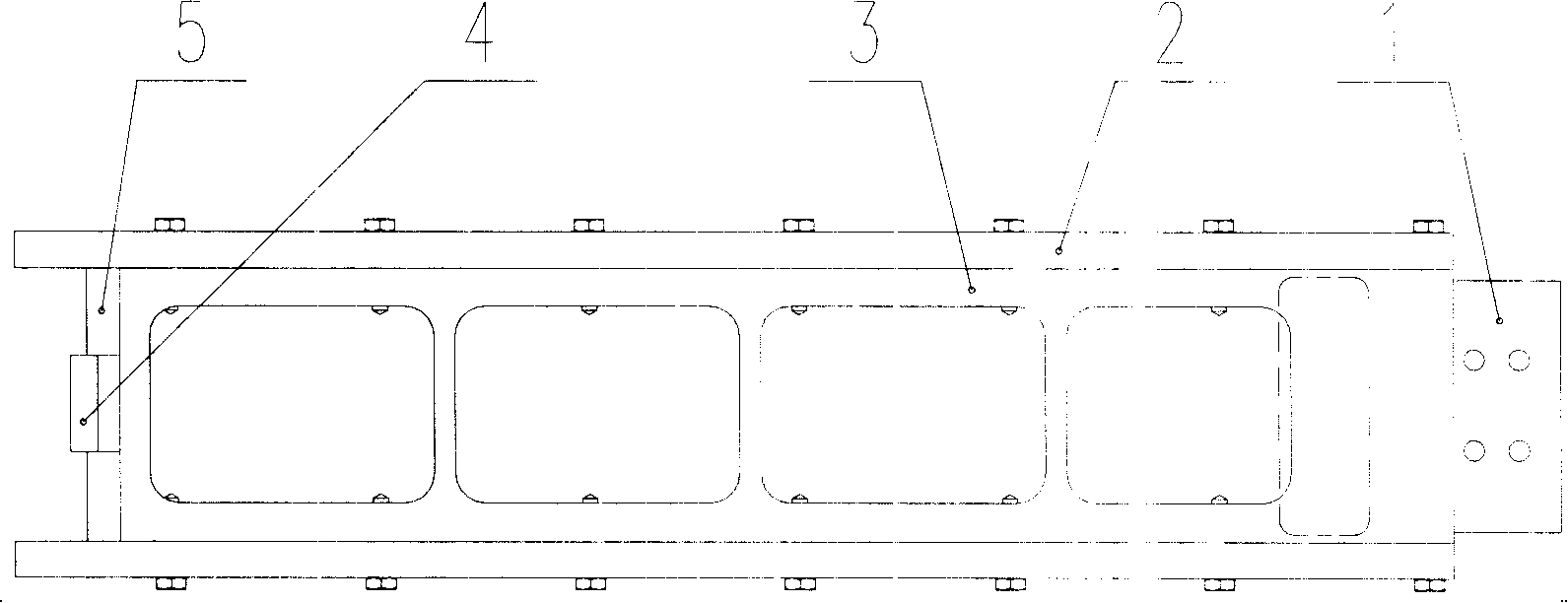
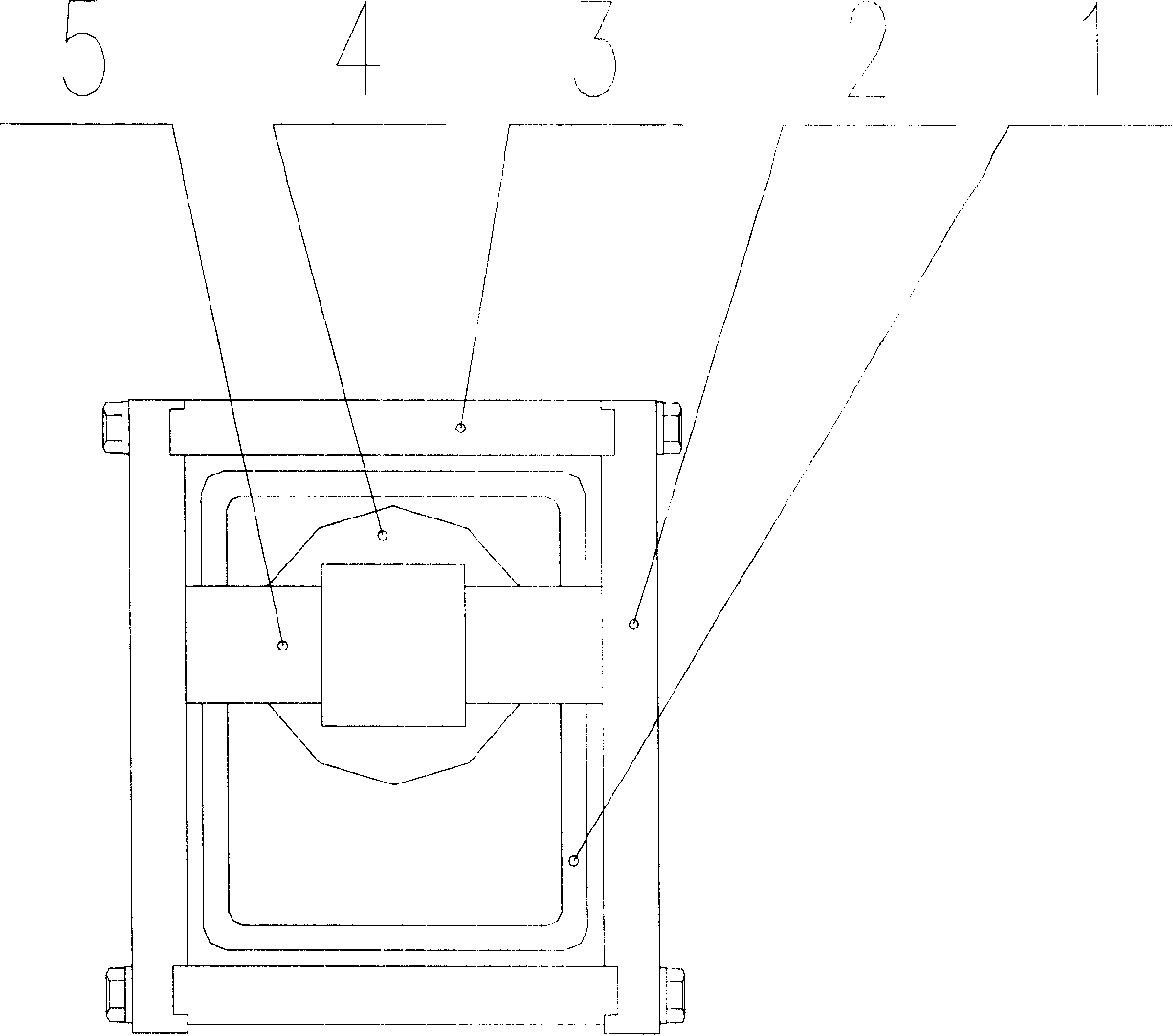
[0022] Such as figure 1 , 2 , 3, 4-1, and 4-2, the telescopic joint of the underwater manipulator of the strong operation type underwater robot of the present invention mainly includes a telescopic arm 1, a guide square sleeve, and a telescopic oil cylinder 4 in structure, wherein:
[0023] The telescopic arm 1 is a hollow rectangular cylinder with a first-class wall thickness, and its section is rectangular (the upper and lower sides are longer than the front and rear sides). There are connecting holes on the four sides of the cylinder at one end of the telescopic arm 1, which are connected to the front joint by screws to drive the front joint to perform telescopic movement; at the corners of the four edges of the cylinder at the other end of the telescopic arm 1, along the A right-angled short groove is processed for placing the rear corne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More