

Structure of robot simulating leg jump of kangaroo
A robot, imitation kangaroo technology, applied in the direction of motor vehicles, toys, automatic toys, etc., can solve the problems of low center of gravity and low jumping efficiency, and achieve the effect of enhancing jumping ability, improving jumping efficiency, and improving energy utilization.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
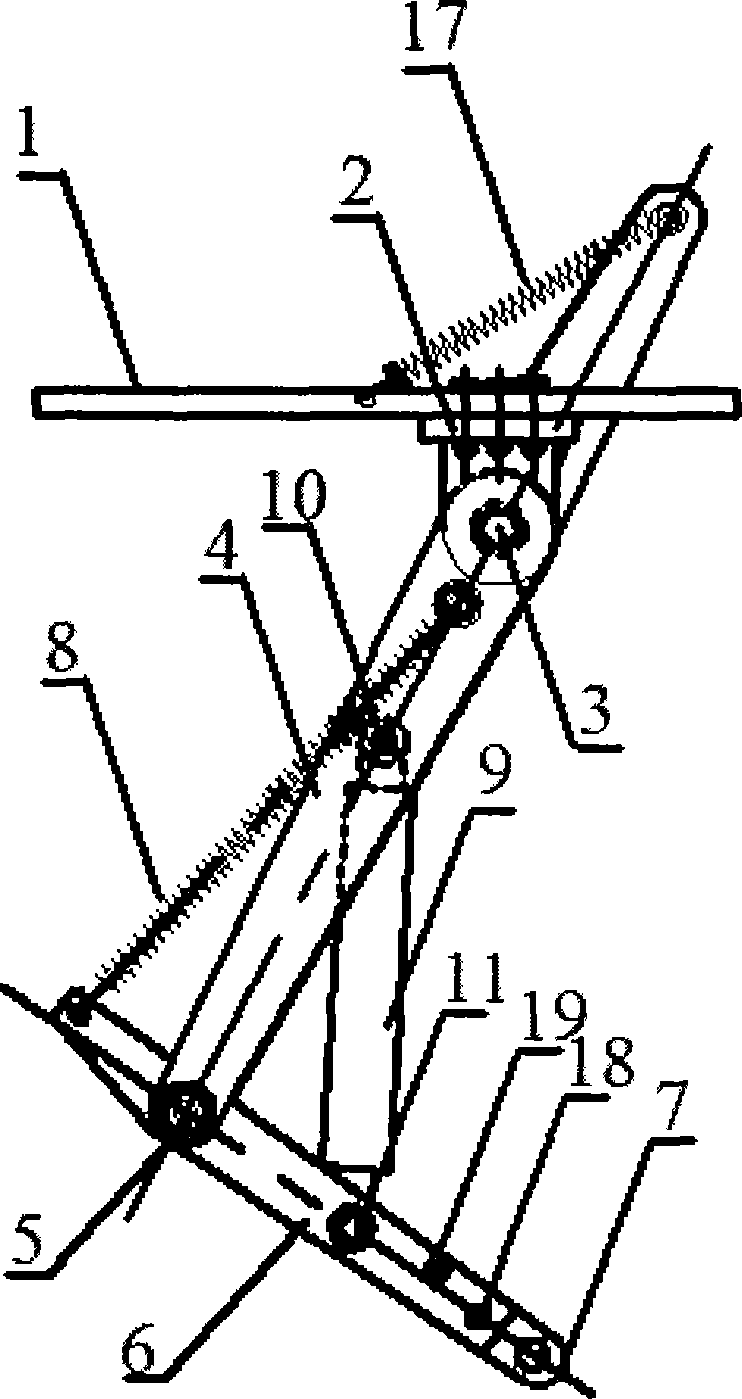
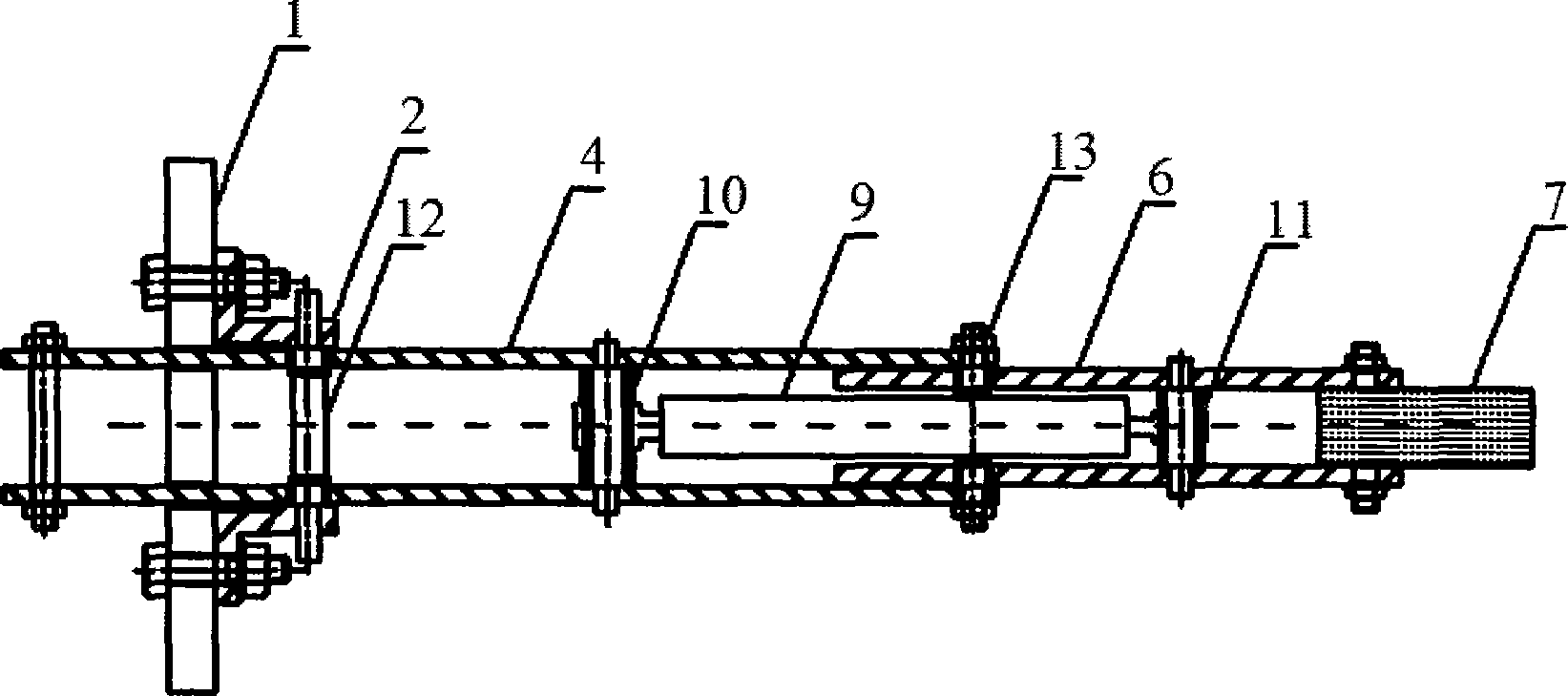
[0018] Device embodiment: refer to figure 1 and figure 2 , the present invention includes a body 1, a load is installed on the body 1, the lower side of the body 1 is connected to the robot knee joint 3 through the support frame 2, the robot knee joint 3 is connected to the robot calf 4 through the leg shaft 12, and the lower end of the calf 4 is the robot ankle joint 5, the sole of the foot 6 and the calf 4 are connected at the ankle joint 5 by the sole shaft 13, the ankle joint 5 is located at 1 / 3 of the sole of the foot 6 at the same time, the sole of the foot 6 and the toe 7 are connected through the toe shaft 18, and the toe shaft 18 is located at the front end of the sole of the foot 6, One end of the lower spring 8 is installed at the rear end of the sole 6, one end is installed at 2 / 5 of the lower leg 4, one end of the upper spring 17 is installed at the upper end of the lower leg 4, and one end is installed at 1 / 2 of the body 1. The power mechanism 9 is connected to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More