

Apparatus for picking up objects
一种取出装置、目标物的技术,应用在图像数据处理、仪器、机械手等方向,能够解决不能应对多个工件互相重叠、难以正确识别工件、复杂等问题
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] Embodiments of the present invention will be described below with reference to the drawings. In the following drawings, the same components are given the same symbols. For easy understanding, the scales of these drawings are appropriately changed.
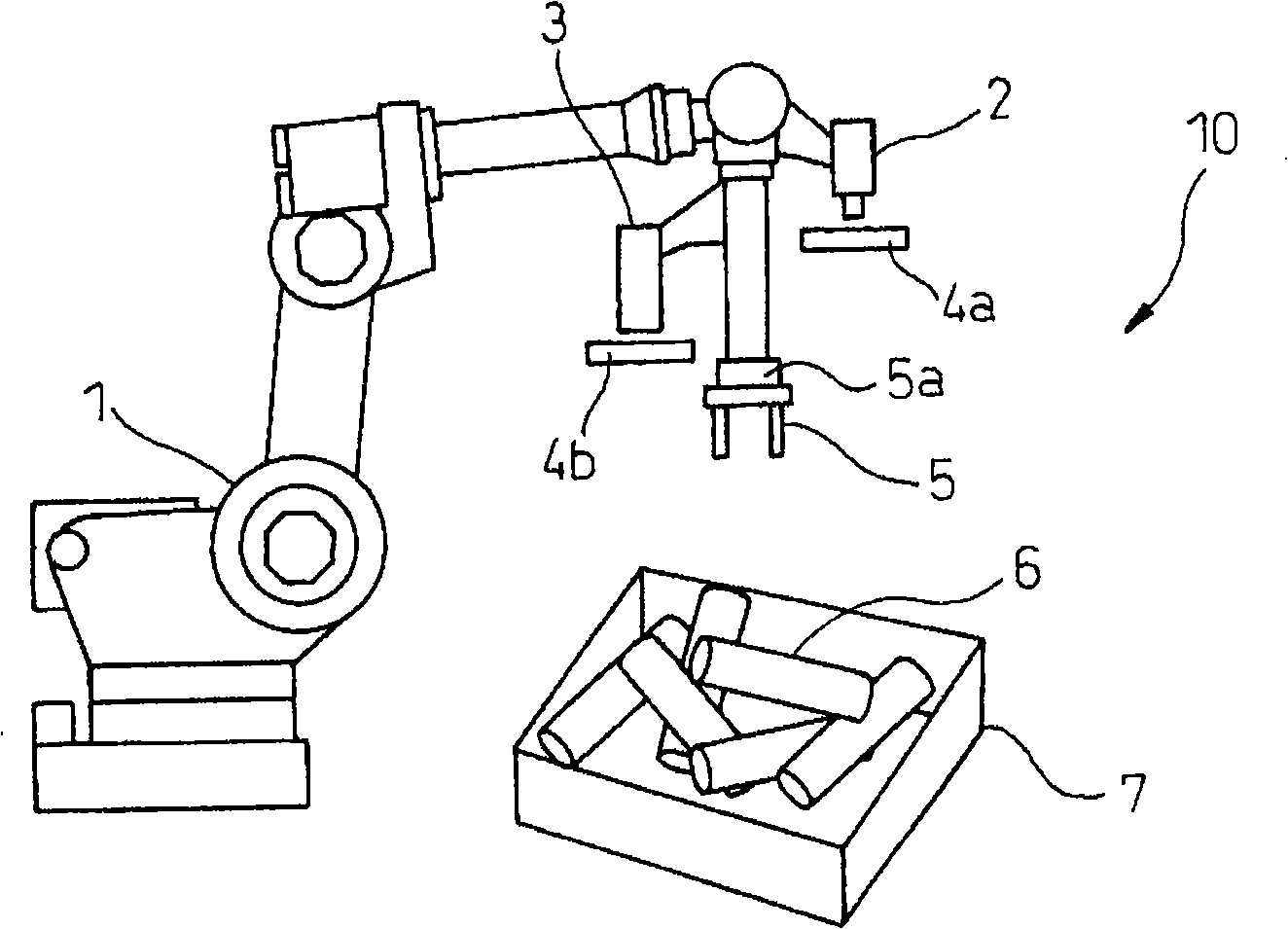
[0045] figure 1 It is a figure which shows the whole structure of the workpiece take-out apparatus which concerns on one Embodiment of this invention.
[0046] The workpiece take-out device 10 of the present invention is composed of a robot arm 1, a camera 2, a three-dimensional vision sensor 3, lighting 4a, 4b, a hand 5, and a floating mechanism 5a, which will be described below. figure 1 The robot hand 1 shown is a known robot hand (hereinafter referred to as robot hand). The robot hand 1 includes all mechanisms that allow the hand 5 to reach a position and posture for taking out work.
[0047] Such a robot 1 is used to take out a plurality of workpieces 6 of the same shape arranged in a pallet 7 . The workpiece taken...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More