

Machining robot control apparatus
A technology for control devices and robots, applied in automatic control devices, metal processing machinery parts, feeding devices, etc., can solve problems such as inability to correct robots correctly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Embodiments of the present invention will be described below with reference to the drawings. In the following drawings, the same reference signs are attached to the same members. For easy understanding, the scales of these drawings are appropriately changed.
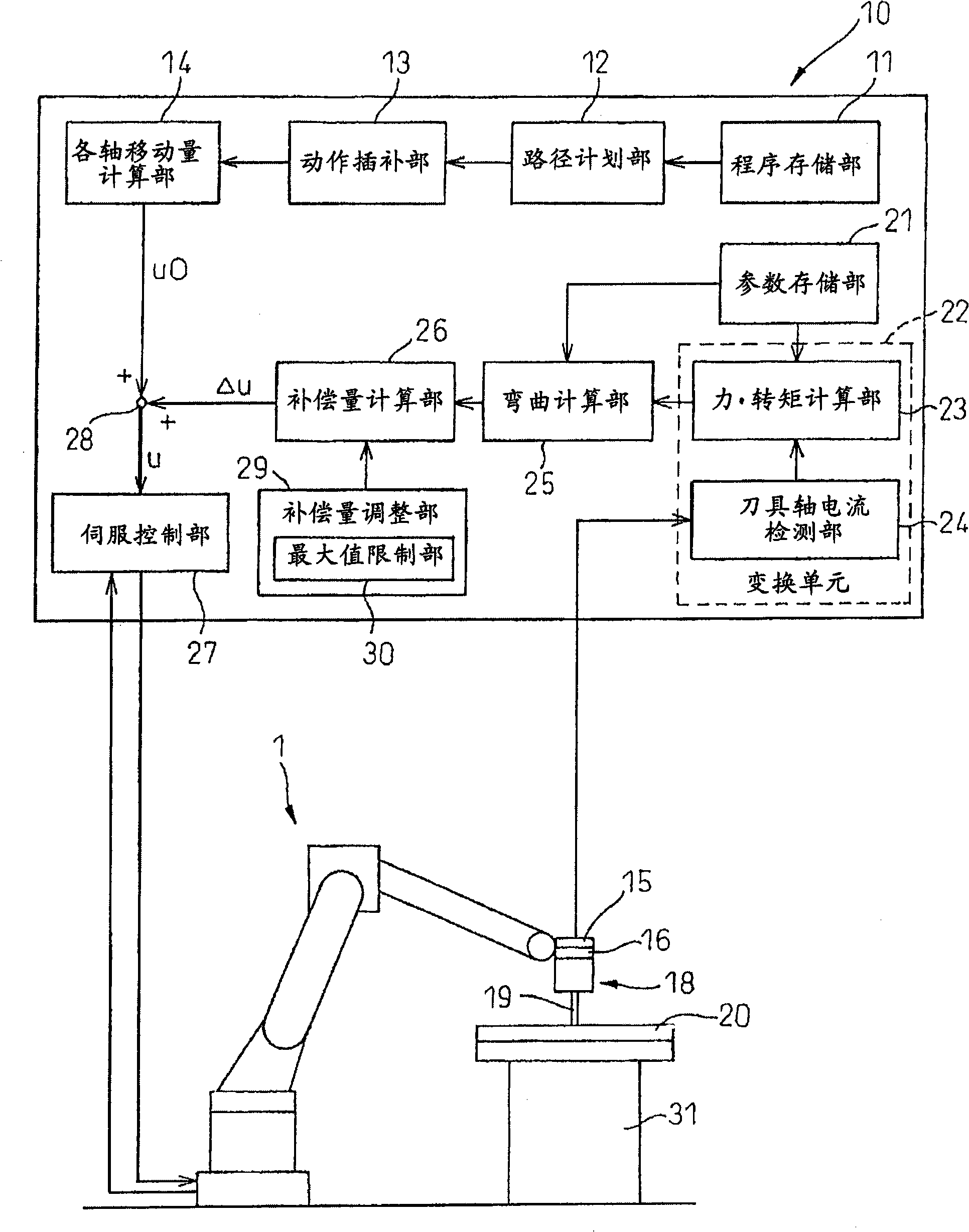
[0031] figure 1 is a functional block diagram of the control device of the processing robot according to the present invention. Such as figure 1 As shown, a control device 10 is connected to a robot 1 , for example, a vertical articulated robot with a six-axis structure. A knife 18 is attached to the tip of the arm of the robot 1 . exist figure 1 In , the tool 18 is a tool used in friction welding and includes an action part 19 . The action part 19 contacts the workpiece 20 fixed on the support table 31 to process the workpiece 20 . In addition, the cutter 18 may also be of other structures, such as a grinder.
[0032] As shown in the figure, a six-axis force sensor 15 is disposed between the tool 18 and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More