

Two-degree of freedom translational parallel manipulator by redundant actuation
A degree of freedom, parallel technology, applied in the direction of manipulators, manufacturing tools, etc., can solve problems such as restricting the working space, and achieve the effects of high transmission efficiency, high motion accuracy, and easy control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
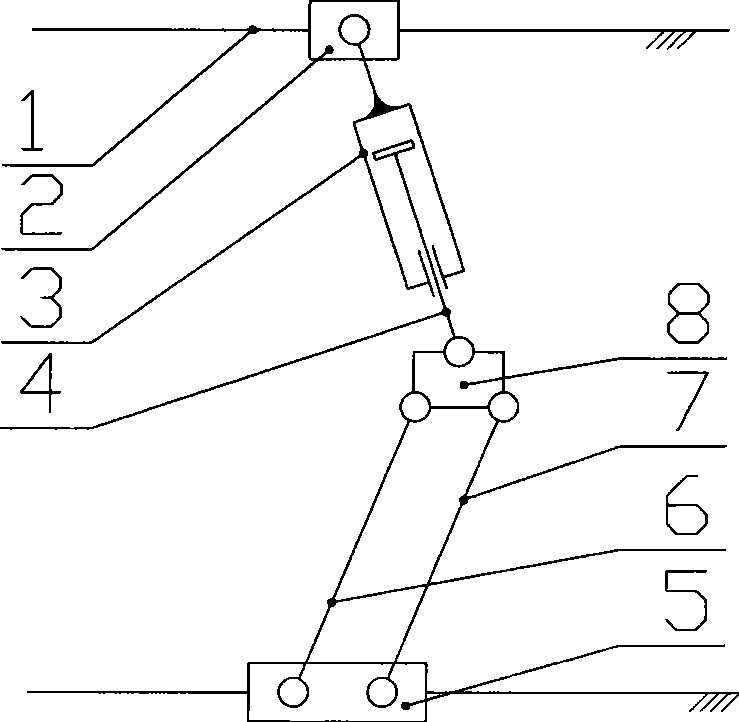
[0020] like figure 1 As shown, this embodiment includes the following components: a fixed platform 1 , an upper slider 2 , a cylinder 3 , a push rod 4 , a lower slider 5 , two supporting rods 6 , 7 , and an end effector 8 . The upper slider 2 is arranged on the upper side of the fixed platform 1, and the lower slider 5 is arranged on the lower side of the fixed platform 1. One end of the cylinder body 3 is connected with the upper slider 2 through a rotating pair, and the other end is connected with the push rod 4 through a moving pair. One end of the rod 4 is connected to the cylinder body 3, and the other end is connected to the end effector 8 through a rotating pair, while the supporting rod 6 and the supporting rod 7 are connected to the lower slider 5 at one end, and the other end is connected to the end effector 8 through a rotating pair. Auxiliary connections, the movement and force transmission of the entire device are realized through the end effector 8.
[0021] In ...
Embodiment 2
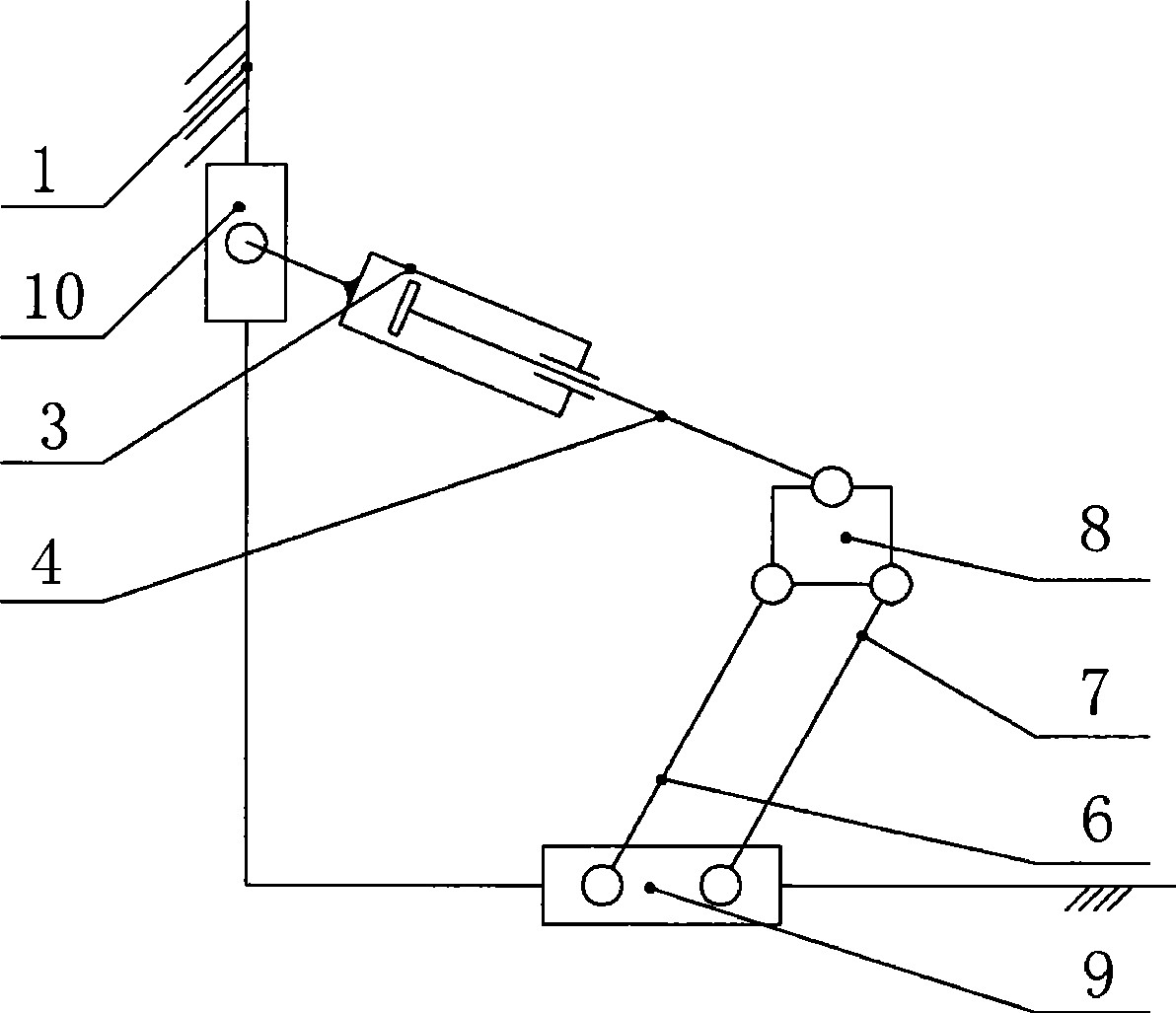
[0027] like figure 2 As shown, on the basis of Embodiment 1, without changing the movement form of the mechanism, the form of the fixed platform is changed from a parallel structure to a vertical structure, thus forming another two-degree-of-freedom mobile redundancy parallel mechanism.
[0028] This embodiment includes the following components: a fixed platform 1 , a vertical slider 10 , a cylinder 3 , a push rod 4 , a horizontal slider 9 , two supporting rods 6 , 7 , and an end effector 8 .
[0029] The vertical slider 10 is arranged on the upper side of the fixed platform 9, and the horizontal slider 9 is arranged on the lower side of the fixed platform 9. One end of the cylinder body 3 is connected with the vertical slider 10 through a rotating pair, and the other end is connected with the push rod 4 through a moving pair. One end of the rod 4 is connected to the cylinder body 3, and the other end is connected to the end effector 8 through a rotating pair, while the supp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More