

Cooperating work control method and system for robot of multiple degree of freedom
An autonomous robot and control method technology, applied in the direction of comprehensive factory control, comprehensive factory control, electrical program control, etc., can solve the problems of low robot efficiency, inability to adapt to complex tasks, and inability to coordinate control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
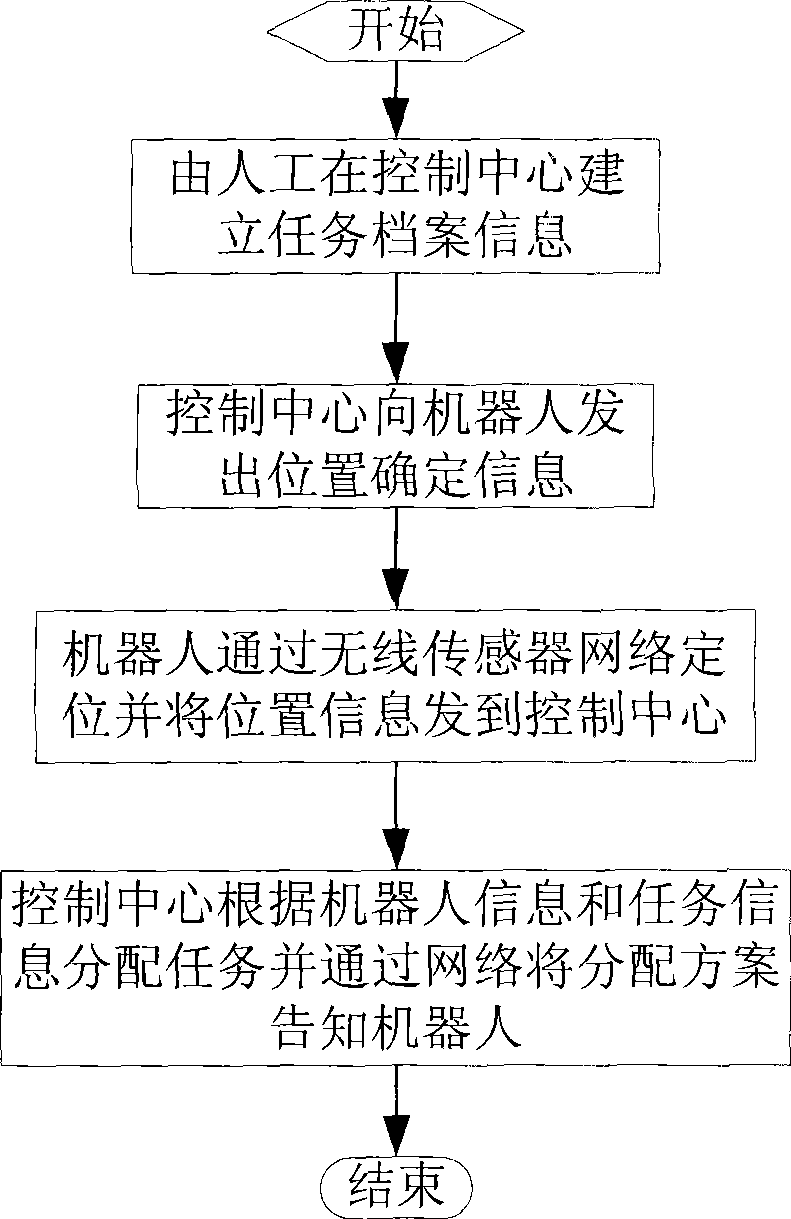
[0007] The multi-robot collaborative operation control system includes a control center, a wireless gateway, a wireless sensor network composed of multiple wireless sensor network nodes distributed on the job site, and robots equipped with wireless sensors are distributed on the job site. According to the position of multiple wireless sensor nodes, the robot adopts the method of trilateral positioning to determine the position of the robot. The control center is responsible for the task assignment of the robot. All robots work together to assign tasks. The wireless gateway is connected to the control center through Ethernet, and broadcasts the task distribution plan of the control center to the robot through the wireless sensor network, and the robot performs the task according to the pre-assigned task. The robot is only equipped with wireless sensors and does not occupy other network resources, and realizes collaborative work under the unified deployment of the control center...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More