

Collaboration work system
An operating system and operation technology, applied in general control systems, control/regulation systems, comprehensive factory control, etc., and can solve problems such as failures, changing robots, etc. that cannot properly respond to conditions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] Embodiments of the present invention will be described based on the drawings.
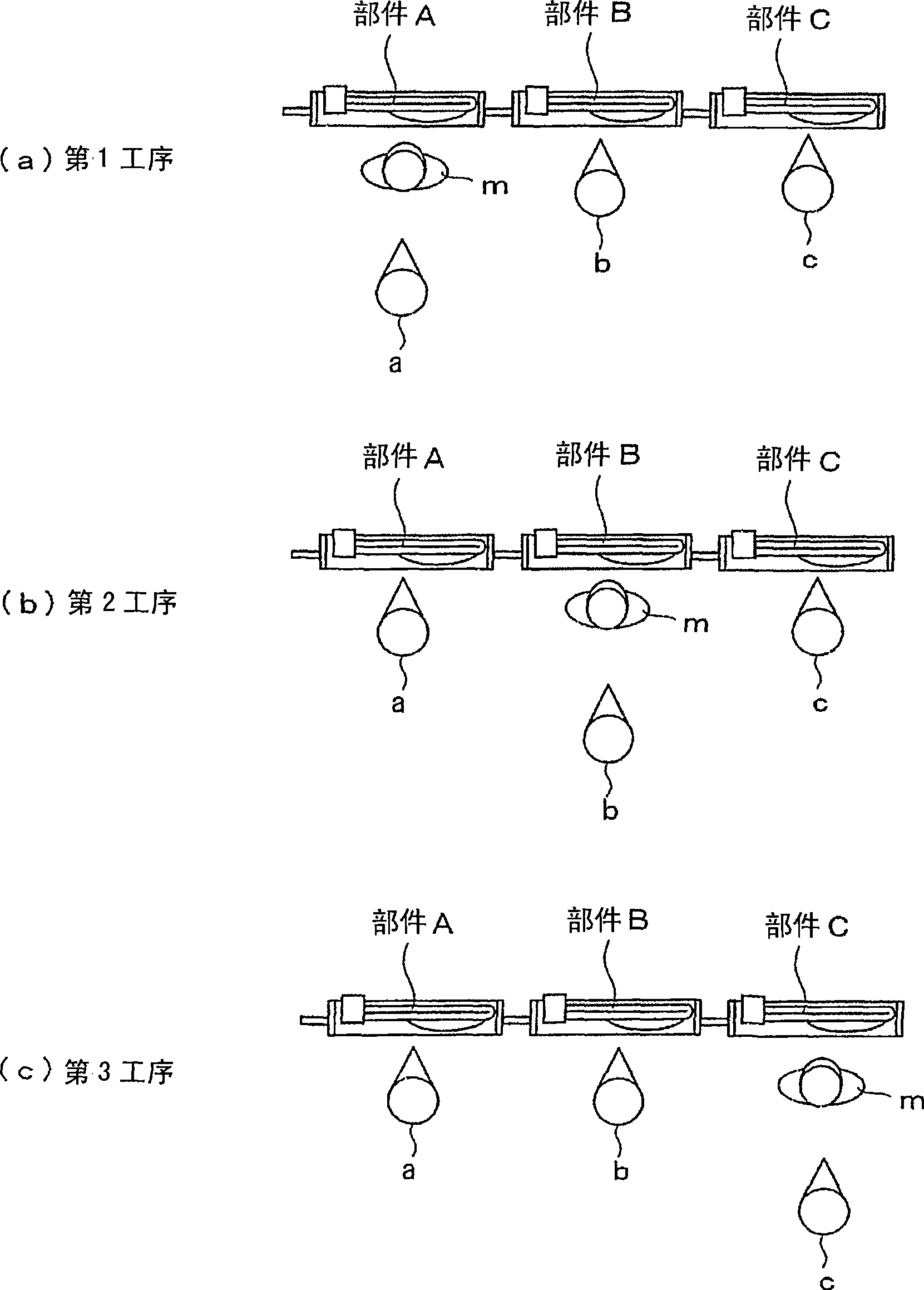
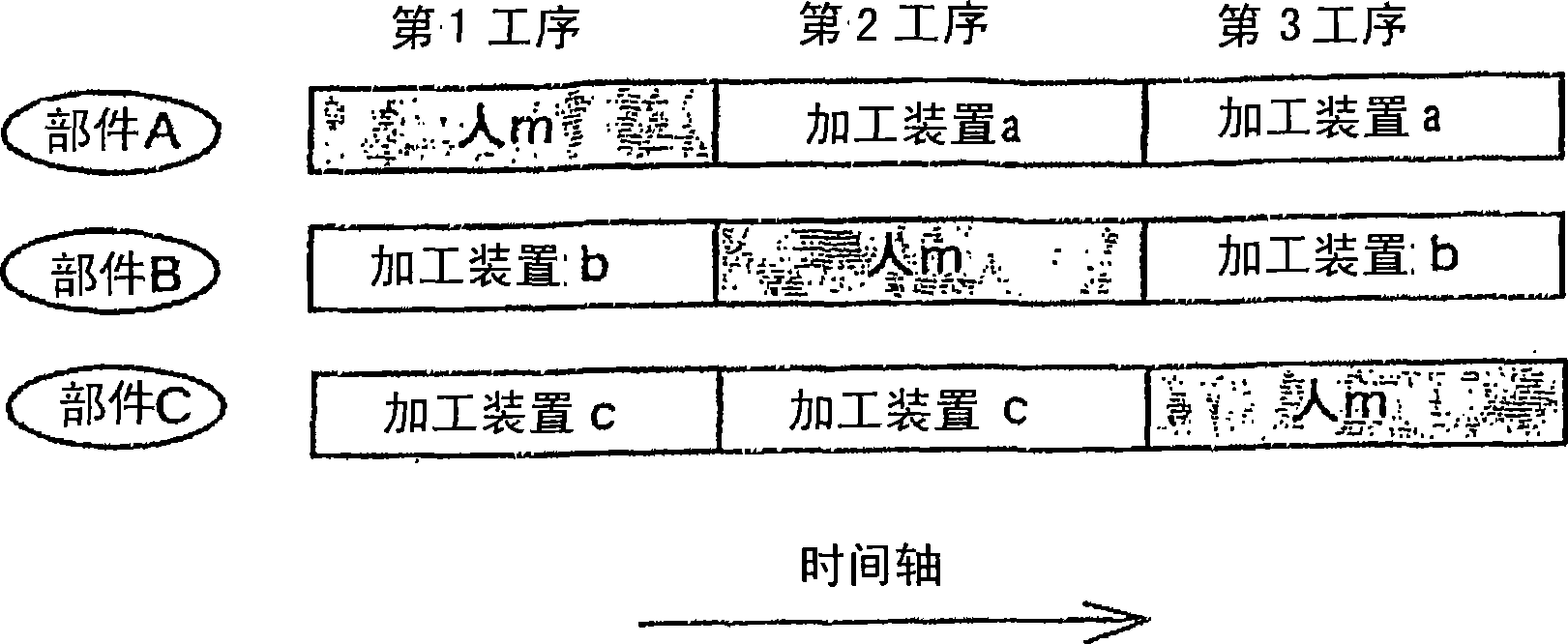
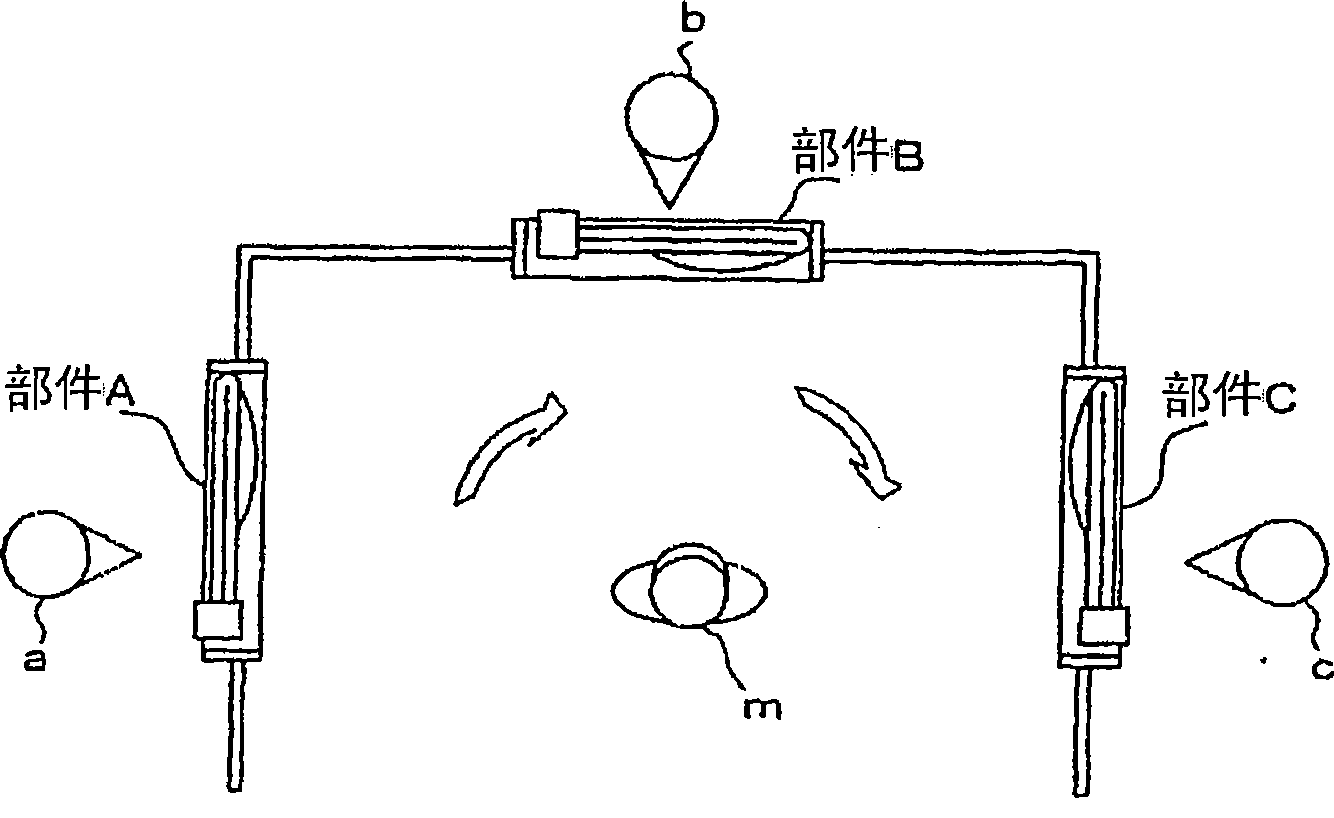
[0019] here, figure 1 It is an explanatory diagram of the state of an example of the joint operation system according to the present invention viewed from above for each process, figure 2 It is an explanatory diagram for viewing job assignments on the time axis, image 3 It is an explanatory diagram looking at another example of the joint operation system from above.
[0020] The multi-device and human cooperative operation system according to the present invention is a system in which human actions can be effectively performed without being restricted by the actions of devices. Hereinafter, for simple description, for example, components A, B, and C are respectively implemented. The processing of three processes, where two processes are processed by mobile devices a, b, c, and one process is processed by person m as an example.
[0021] That is, for example, components A, B, and C are t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More