

AUV combined navigation system non-tracing switch method
An integrated navigation system and switching mode technology, applied in the field of AUV integrated navigation system traceless switching technology, can solve the problems of inertial navigation calculation error, filter divergence, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention is described in more detail below in conjunction with accompanying drawing example:
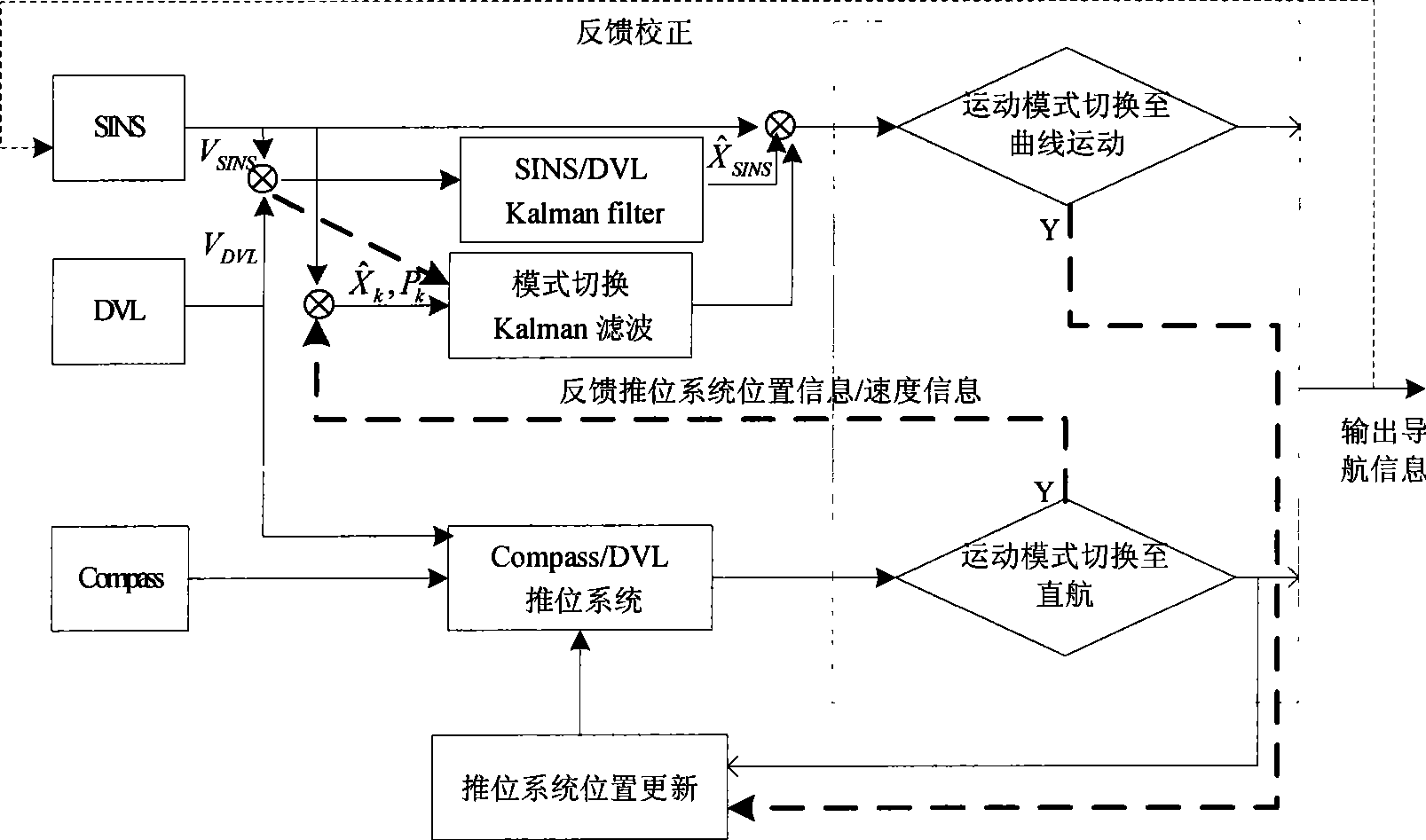
[0049] combine figure 1 , the AUV integrated navigation system traceless switching technology of the present invention comprises the following steps:
[0050] Step 1. Determine the initial position parameters and initial velocity values of the carrier through an external device.
[0051] Step 2, the carrier sails according to the preset path, and the strapdown inertial navigation system updates the cycle H=t m -t m-1 Inside, collect the angular velocity ω of the carrier output by the gyro relative to the inertial coordinate system, and the specific force f of the carrier output by the accelerometer relative to the inertial coordinate system b , to perform attitude calculation and position velocity calculation, as the output value of the strapdown inertial navigation system.
[0052] Step 3. In the state of direct flight of the carrier, use the SINS / DVL close...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More