

System for performing non-contact type human-machine interaction by vision
A human-computer interaction and non-contact technology, applied in the field of human-computer interaction, can solve the problems that the machine cannot effectively distinguish between intentional eye movement commands and unintentional eye movement commands, hinder the wide application of interactive methods, and achieve easy-to-operate information channel bandwidth Requirements, a wide range of applicable people, and strong operability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be more clearly understood in conjunction with the detailed description of the embodiments with reference to the accompanying drawings.
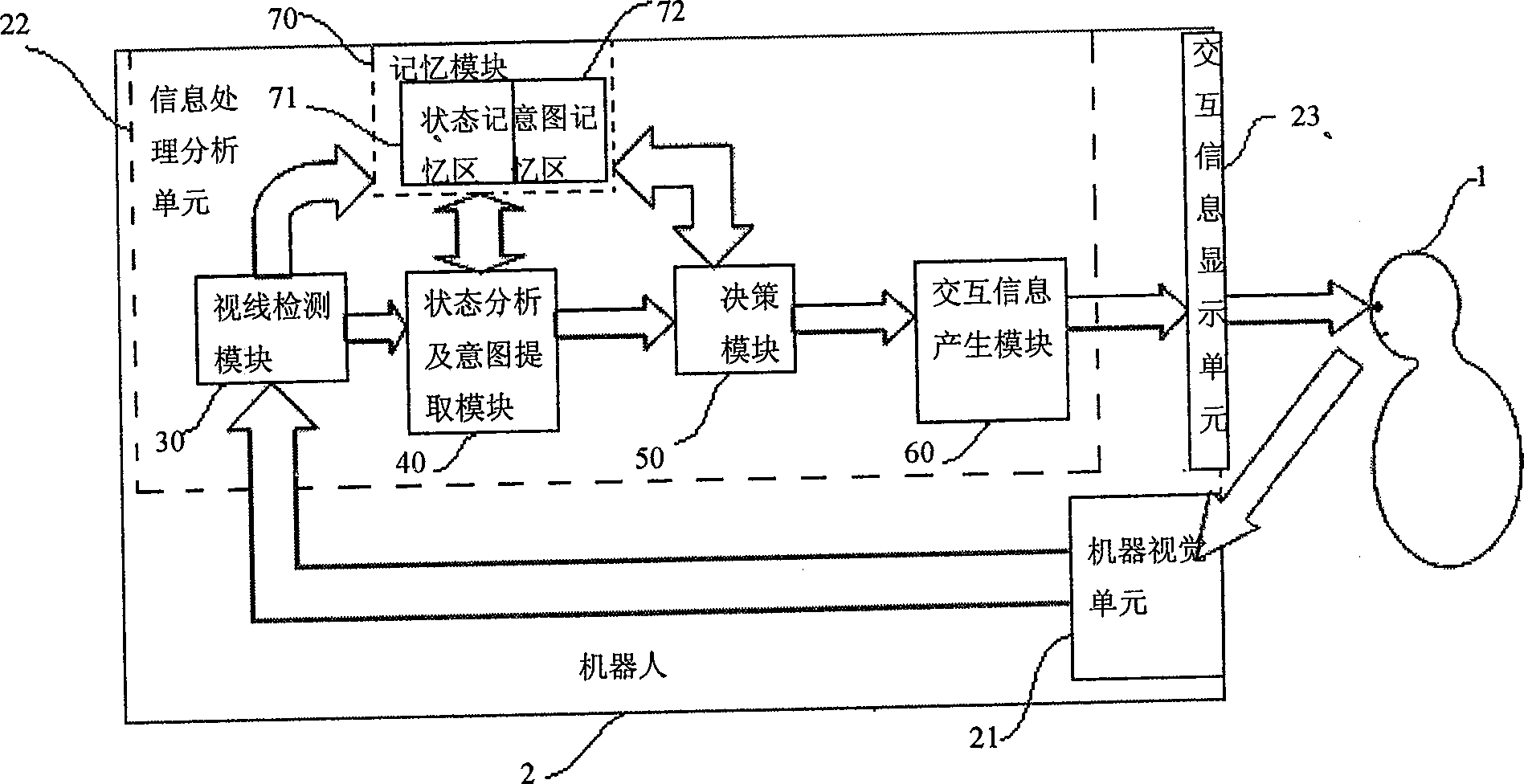
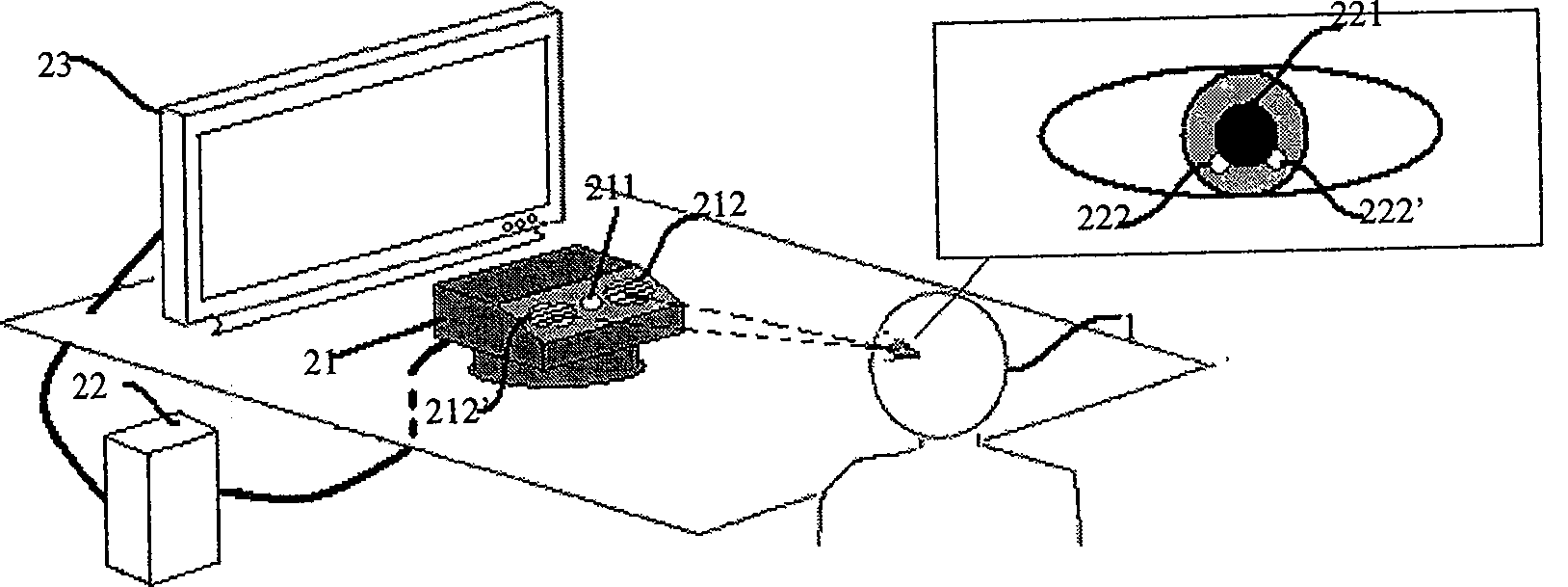
[0043] refer to Figure 1 to Figure 2 ,in figure 1 It shows the overall structure and information flow diagram of an embodiment of the system for non-contact human-computer interaction using vision according to the present invention; figure 2 A schematic diagram of the actual system of this embodiment is shown. Such as figure 1 As shown, the interaction process is embodied as the circulation process of information between the user 1 and the robot 2 . The robot 2 includes three basic units: a machine vision unit 21 , an information processing and analysis unit 22 and an interactive information display unit 23 . The machine vision unit 21 is used to acquire the facial image information of the user 1; the information processing and analysis unit is used to detect the user's current line of sight informatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More