

Flexible pectoral fin swing type underwater bionic robot
A bionic robot and swing-type technology, which is applied in the direction of underwater operation equipment, ships, non-rotating propulsion components, etc., can solve the problems that the propulsion speed and propulsion efficiency cannot reach the speed and efficiency, and achieve the effect of high mobility movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described in detail below in conjunction with the accompanying drawings.
[0047] The flexible pectoral fin swing type underwater bionic robot of the present invention is based on the principle of bionics, by using the characteristics of low frequency, low resistance, high efficiency, and high maneuverability of the underwater pectoral fin swing propulsion mode, a distribution driven by pneumatic artificial muscles is designed. A type of flexible internal skeleton and a flexible body of the pectoral fin swing-propelled bionic robot. Generally, the bionic robot includes two parts: an air source and a bionic structure.
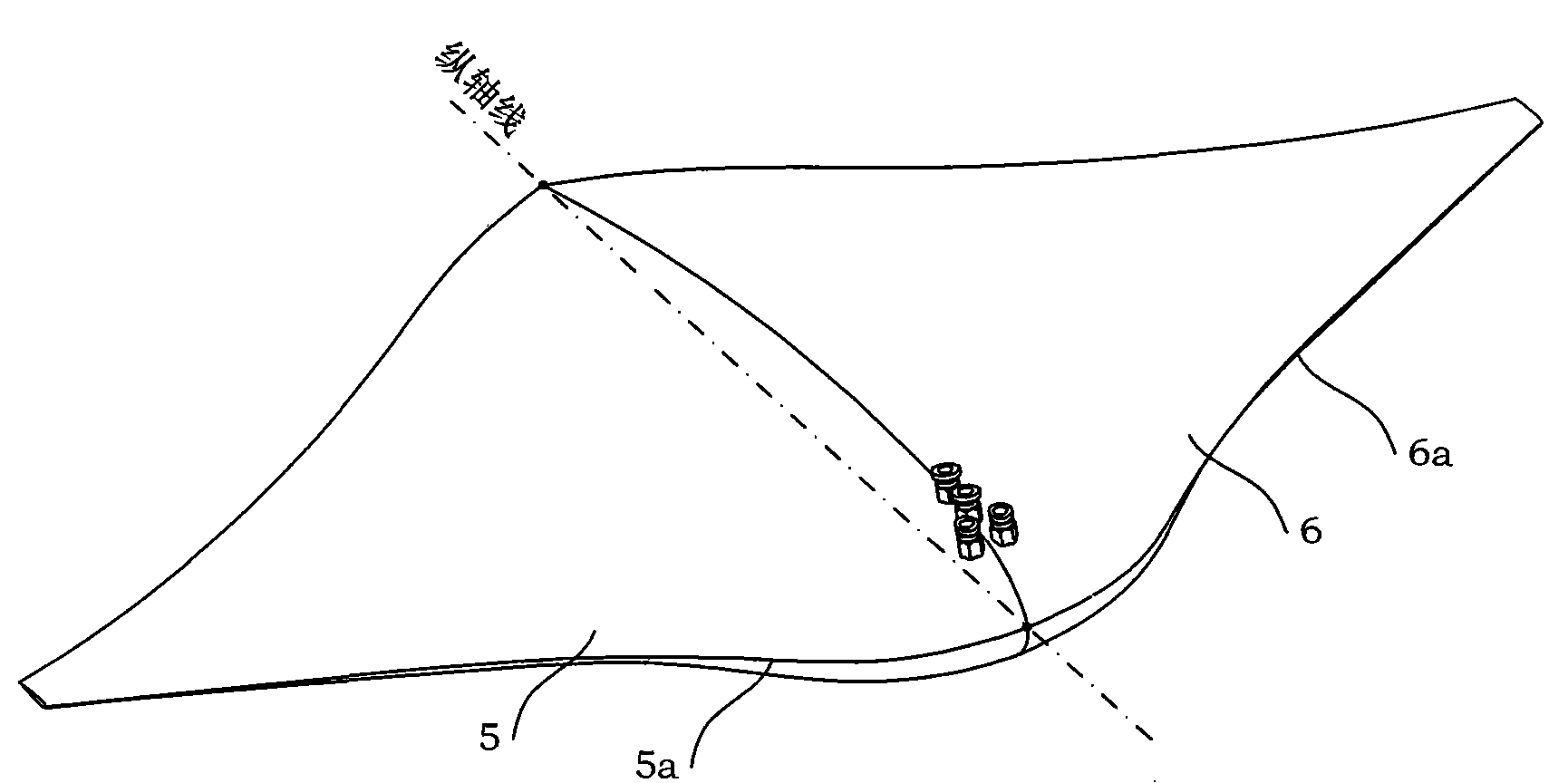
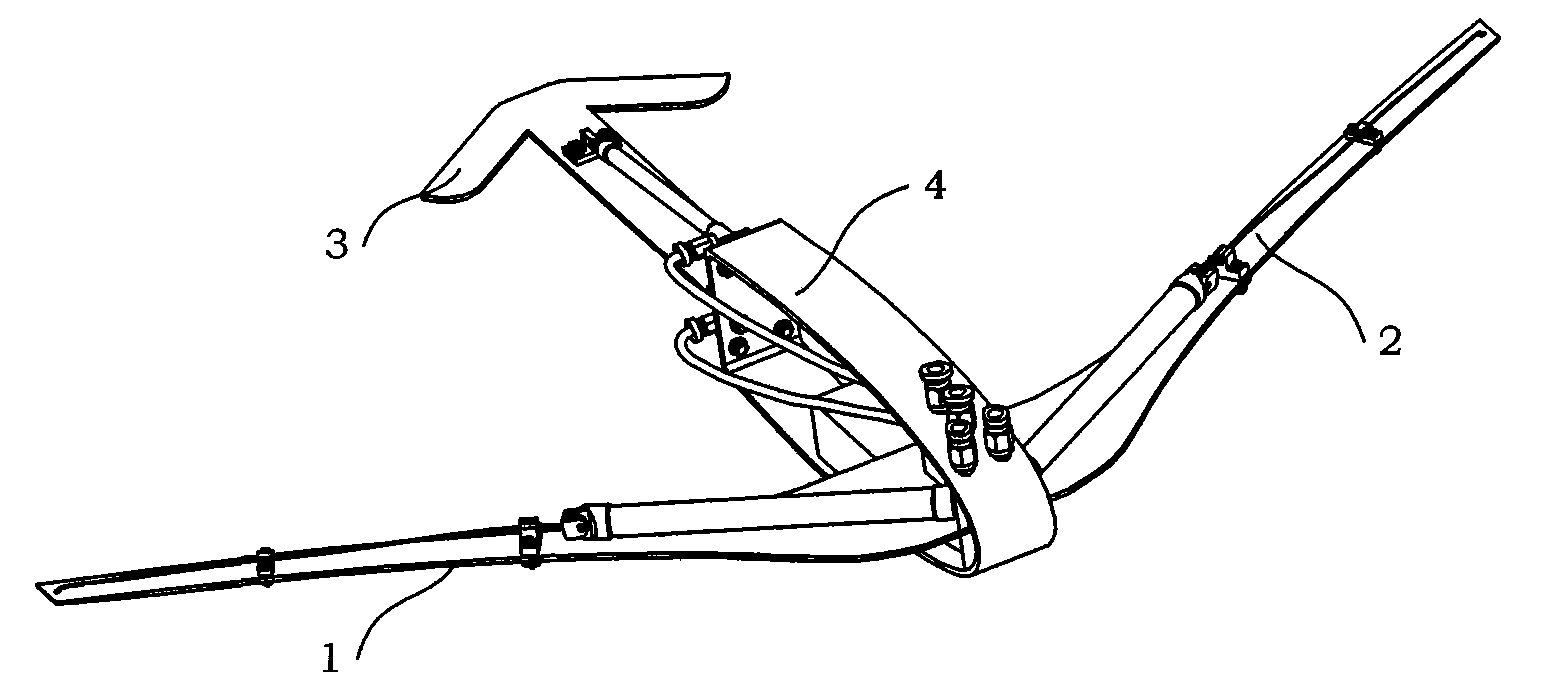
[0048] See figure 1 , Figure 1A As shown, the flexible pectoral fin swing type underwater bionic robot of the present invention is composed of a left swing assembly 1, a right swing assembly 2, a tail swing assembly 3, a support assembly 4, a left flexible wing 5, and a right flexible wing 6. ; The left flexible wing 5 an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More