

Method for regulating an active chassis of a tracked vehicle
A rail vehicle and operating mechanism technology, applied in transportation and packaging, railway car body parts, bogies, etc., can solve problems such as shortening the service life of wheels
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
[0091] In a first preferred derivative control scheme according to the invention, the curve fitting control, i.e. adjusting the steering angle of the first wheel set 105 in a first frequency range, adopts the first target steering angle by the control unit 113 to take effect, the steering angle corresponds to the first ideal target steering angle Multiplied by a predetermined first correction factor K 1 , that is, the following equation applies:
[0092]
[0093] The first ideal target steering angle is chosen so that at K 1 =1, that is, the first target steering angle When the actual curvature of the trajectory corresponds to the first ideal target steering angle, the first wheel set 105 is radially adjusted toward the curve.
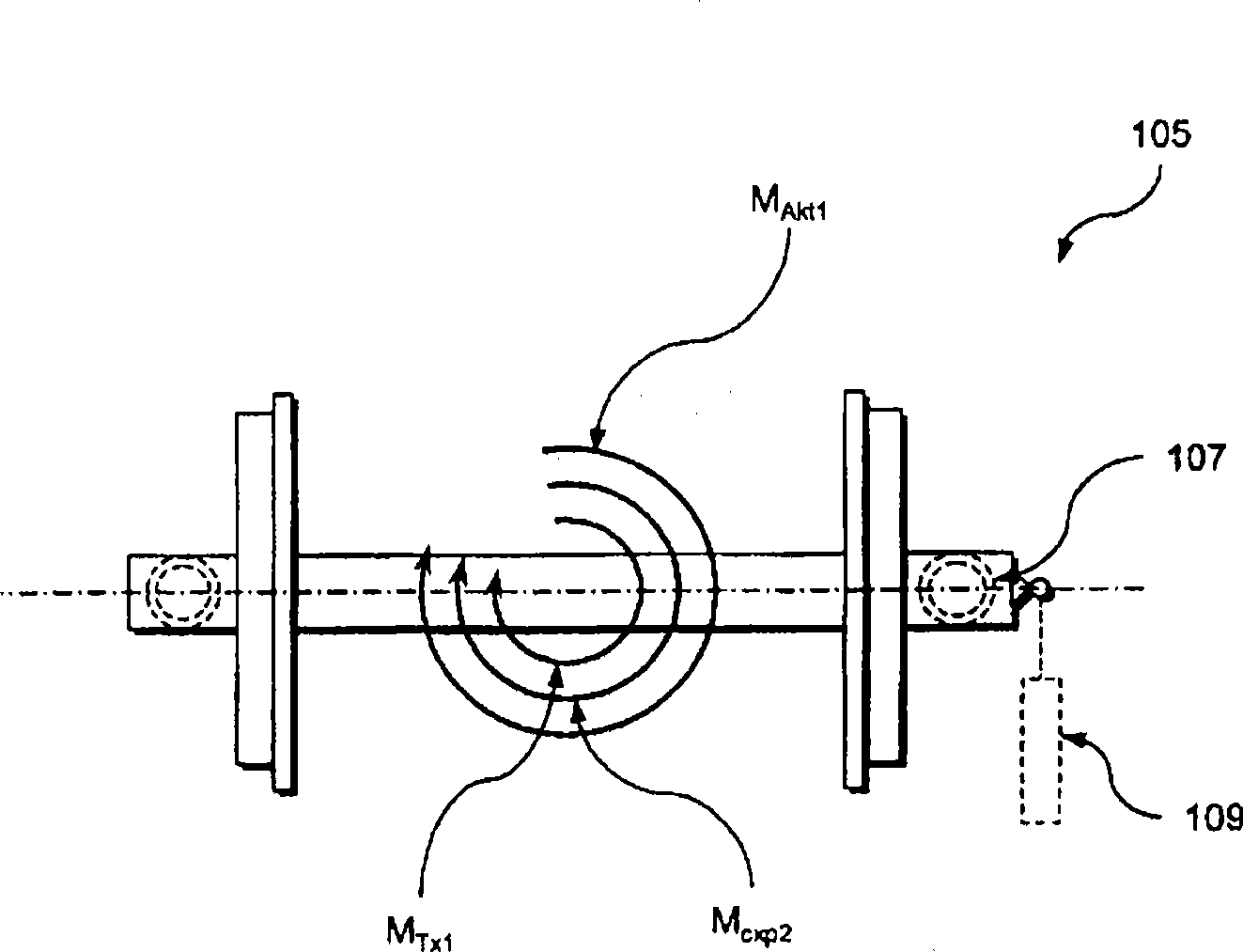
[0094] Furthermore, the control is performed such that the first actuator 109 momentarily does not substantially apply any steering torque in the first frequency range, ie M Akt1 =0. According to the result of the moment balance of equation ...
no. 2 example
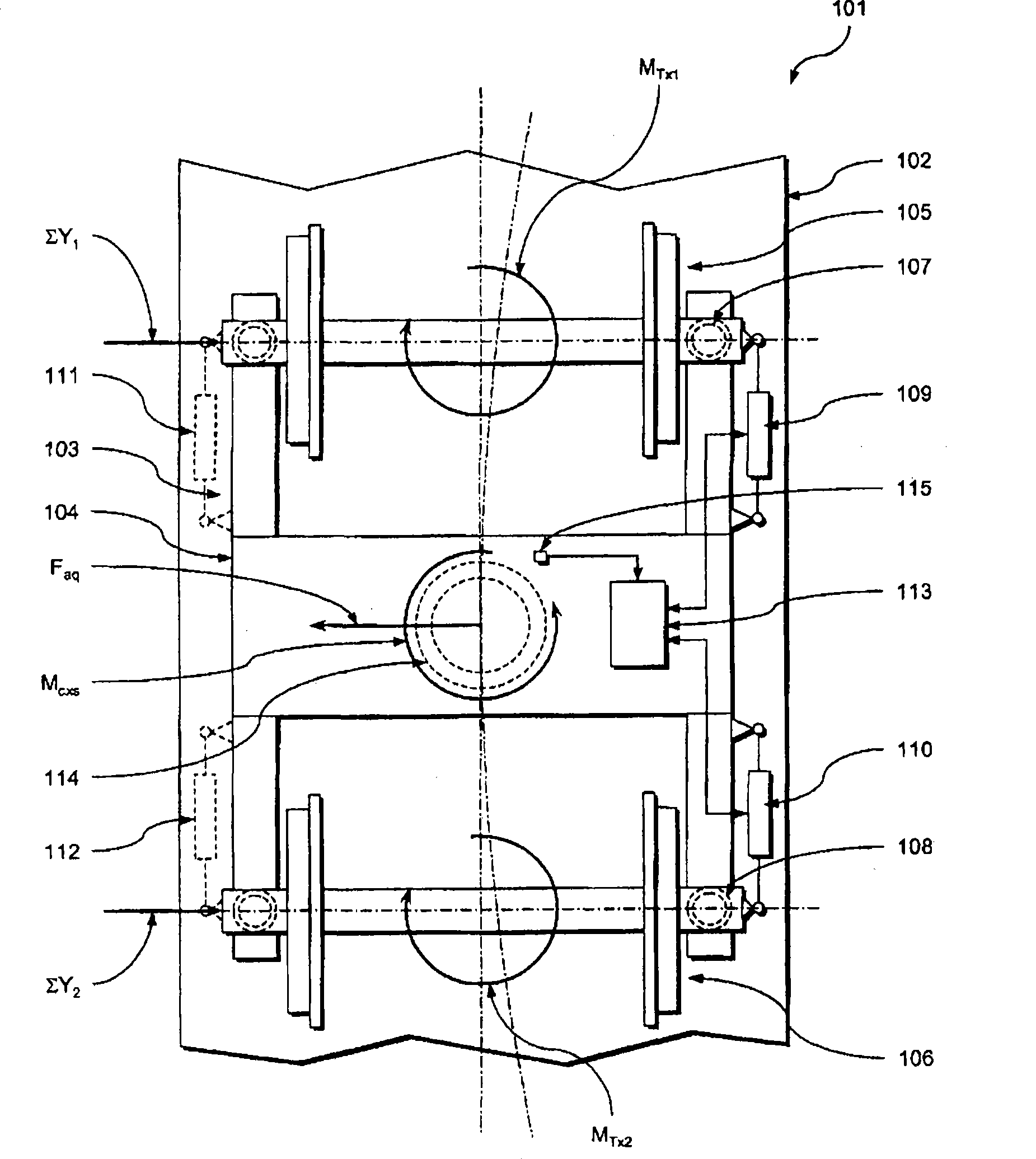
[0120] Therefore, utilizing the preferred second derivative control scheme, although the steering angle of the first wheel set 105 (i.e., M Akt1 =0), but using the third target steering angle adjust the steering angle of the second wheel set 106 within the first frequency range, which corresponds to a third desired target steering angle Multiplied by a predetermined third correction factor K 3 . Third Ideal Target Steering Angle selected so that at K 3 = 1, that is, if the third target steering angle Meet the third ideal target steering angle Then the steering moment Mtx1 produced by the paired wheel track on the actual curve of the track on the first wheel set 105 is reversely equal to the steering moment M produced by the paired wheel track on the actual curve of the track on the second wheel unit Tx2 (i.e., M Tx1 =-M Tx2 ).
[0121] From the above equations (3) to (6), the above relationship is as follows:
[0122] Σ Y ...
no. 3 example
[0129] In a preferred third derivative control scheme, the curve fitting control, i.e. adjusting the steering angle of the first wheel set 105 within the first frequency range, utilizes the first target steering angle via the control unit 113 To implement, the first target steering angle corresponds to the first ideal target steering angle Multiplied by a predetermined first correction factor K 1 , that is, the following equations also apply:
[0130]
[0131] In this case, the first actuator 109 is set to be adjusted in the first frequency range to follow the rotation of the first wheel unit caused by the change in trajectory curvature, so that the first actuator 109 is at K 1 =1, that is, the first target steering angle Meet the first ideal target steering angle on the actual curve of the trajectory When , the first steering moment M is instantaneously applied in the first frequency range Akt1 , the steering moment and the steering moment M of the first main sprin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More