

Lane changing control method and device of autonomous vehicle
A technology for automatic driving and vehicles, applied in control devices, vehicle components, transportation and packaging, etc., can solve problems such as step jumps in the preview trajectory, poor ride comfort, sudden increase in lateral acceleration at lateral corners, etc. The effect of smooth changes, alleviating poor ride comfort, and improving ride comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
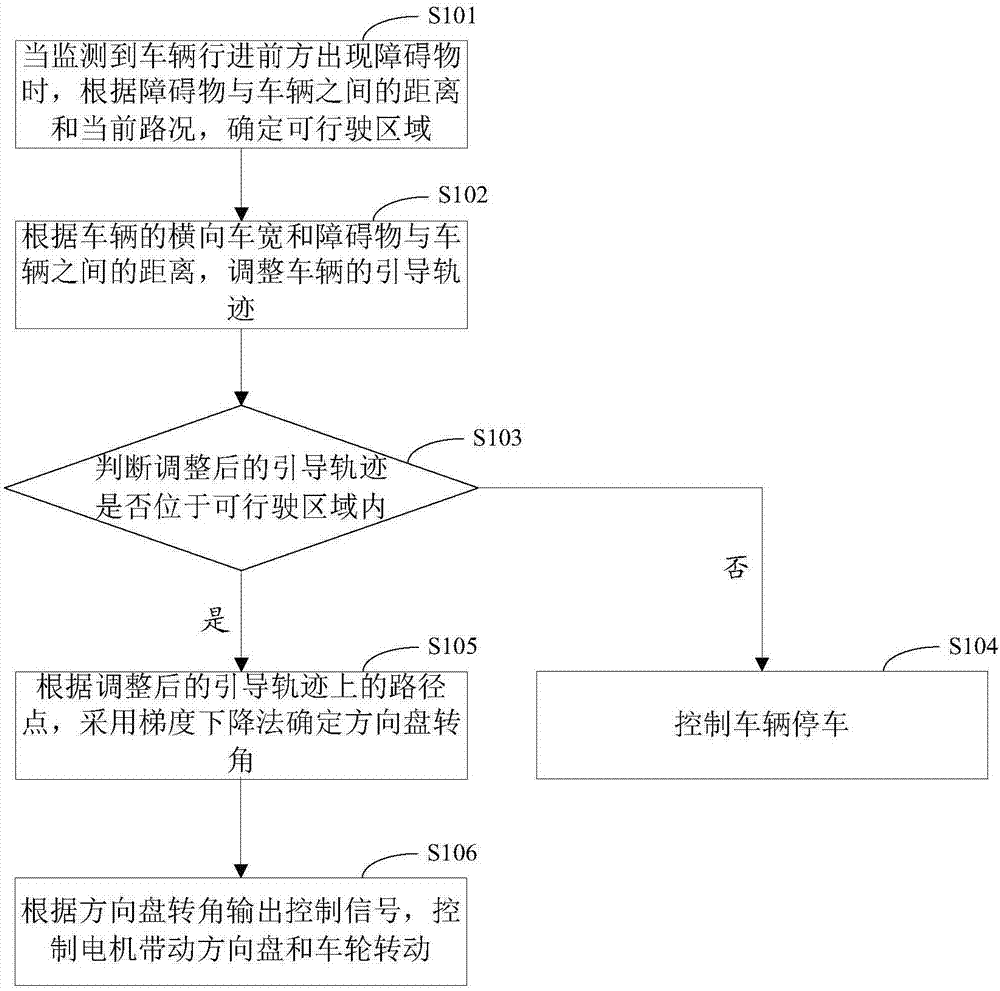
[0062] This embodiment provides a lane change control method for an automatic driving vehicle, the flow chart of the method is as follows figure 1 shown, including the following steps:
[0063] Step S101, when an obstacle is detected in front of the vehicle, the drivable area is determined according to the distance between the obstacle and the vehicle and the current road conditions.
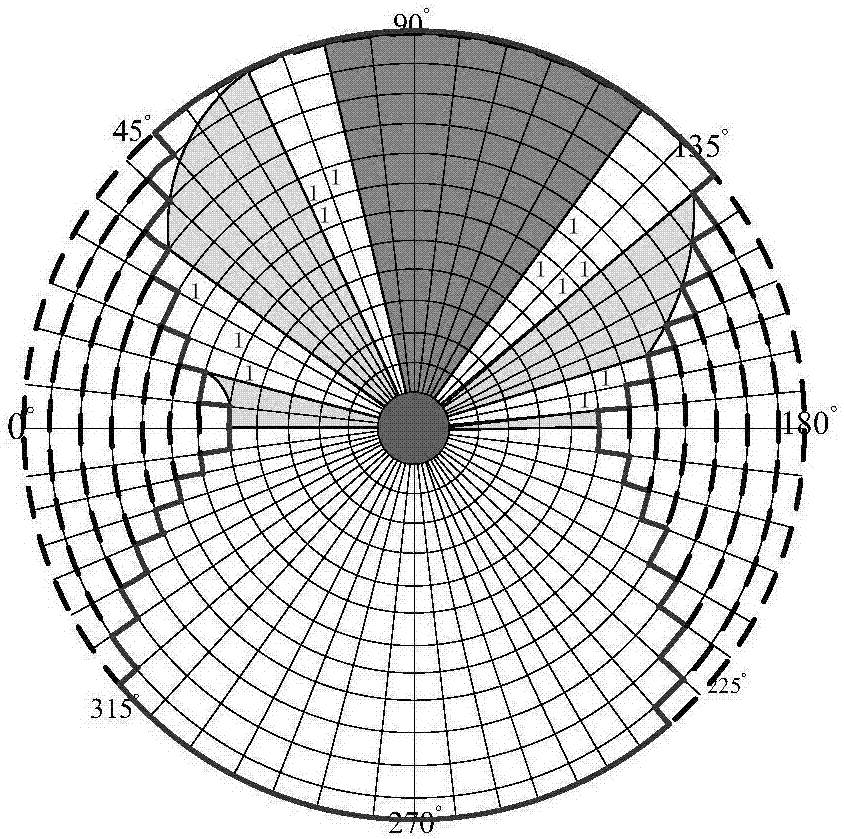
[0064] Among them, the distance between the obstacle and the vehicle and the current road condition can be obtained by sensors such as radar, navigation or camera. According to the data transmitted by the sensor, the grids in the polar coordinate system are divided into obstacle grids and obstacle-free grids. For example, if figure 2 As shown, fill the data of the sensor in the polar coordinate system and fill it according to binarization. That is, the obstacle grid is filled with 1, and the non-obstacle grid is filled with 0. Considering the movement characteristics of the vehicle itself, a...
Embodiment 2
[0091] This embodiment provides another lane change control method for an automatic driving vehicle, the flow chart of the method is as follows Figure 5 shown, including the following steps:
[0092] Step S501, when an obstacle is detected in front of the vehicle, a preliminary drivable area is determined according to the distance between the obstacle and the vehicle and the current road conditions. The specific implementation method can refer to the method of marking and counting in the polar coordinate system described in the first embodiment.
[0093] Step S502, determine whether the current road section where the vehicle is located is a structured road; if yes, execute step S503; if not, consider the current road section as an unstructured road, and execute step S504.
[0094] According to the pre-stored electronic map data, it can be determined that the current road section where the vehicle is located is a structured road or an unstructured road. For structured two-wa...
Embodiment 3
[0132] Corresponding to the above method embodiments, this embodiment provides a lane change control device for an automatic driving vehicle. Such as Figure 10 As shown, the device includes:
[0133] The drivable area calibration module 901 is configured to determine the drivable area according to the distance between the obstacle and the vehicle and the current road conditions when an obstacle is detected in front of the vehicle.
[0134] The guiding trajectory adjustment module 902 is configured to adjust the guiding trajectory of the vehicle according to the lateral vehicle width of the vehicle and the distance between the obstacle and the vehicle.
[0135] The rotation angle calculation module 903 is used to judge whether the adjusted guidance trajectory is within the drivable area; if so, determine the steering wheel rotation angle by using the gradient descent method according to the waypoints on the adjusted guidance trajectory.
[0136] The signal output module 904 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More