

Rocker-type wheel and track combining robot
A rocker type, robot technology, applied in the direction of motor vehicles, tracked vehicles, transportation and packaging, etc., can solve problems such as difficulties, large vibration, and large fluctuations of the main robot platform, and achieve strong ability to adapt to uneven terrain and simple structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with the drawings and embodiments.
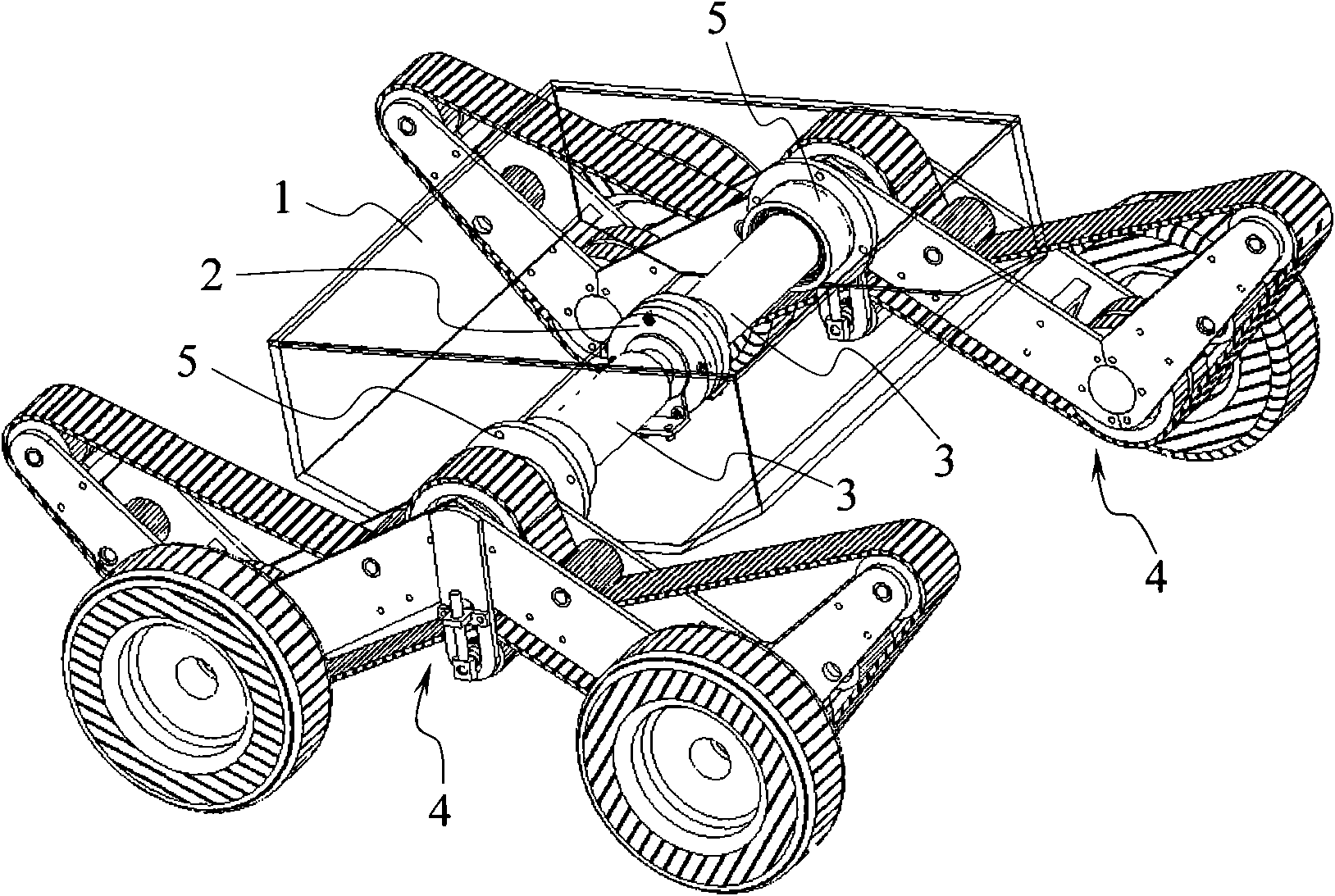
[0015] figure 1 It is a three-dimensional structural diagram of an embodiment of the present invention. In order to clearly show the structure, the main body of the robot is made transparent. figure 1 Among them, the present invention is composed of a main box body 1, a differential balancer 2 connected to the main box body 1, a connecting cylinder 3, and two symmetrically arranged walking part assemblies 4 connected to the differential balancer 2. The differential The shell of the balancer 2 is fixed in the middle position of the main box 1, one end of the two symmetrically arranged connecting cylinders 3 is connected to the two extension shafts of the differential balancer 2, and the other end is supported on the main box 1. The bearing seat 5 is connected to the bracket 14 of the walking part assembly 4 provided on the left and right sides of the main box body 1. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More