

Robot predicting method and system
A robot and algorithm technology, applied in the field of robots, can solve problems such as remote operation of space objects that are not applicable to multi-degree-of-freedom, and achieve the effect of flexible control and convenient use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0038] The technical solution provided by the embodiment of the present invention is used to predict the position and movement of the robot in the operation scene, and can be applied to the remote operation control of the robot. Operations provide references for operations.
[0039] The technical solutions provided by the embodiments of the present invention can be applied to humanoid robots, that is, robots that have human appearance characteristics and can simulate basic human actions. In addition, they can also be applied to other types of robots, such as mobile robots, medical robots, and the like.
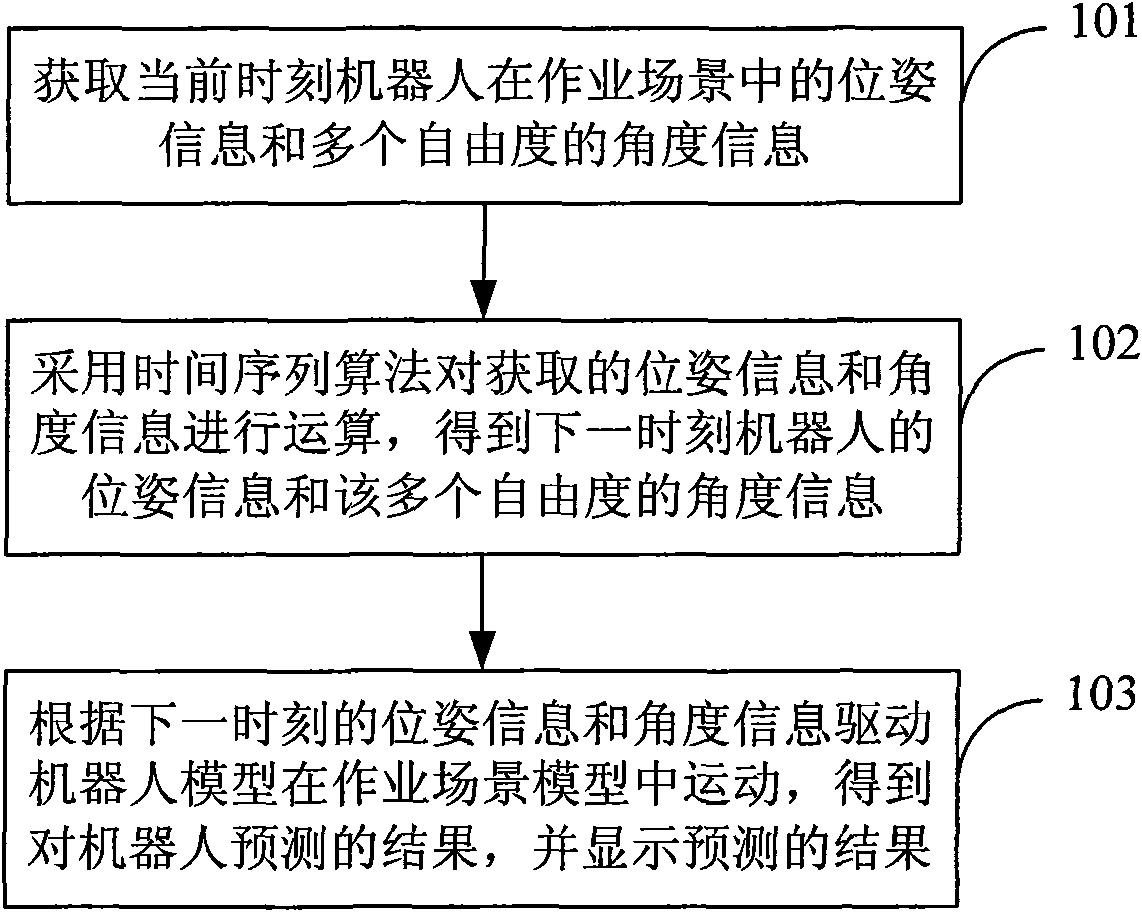
[0040] see figure 1 , an embodiment of the present invention provides a method for robot prediction, including:
[0041] Step 101: ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More