

Reconstruction of human emulated robot working scene based on multiple information integration
A technology of multi-information fusion and operation scenarios, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of large delay, inability to truly reflect the operation situation of robots, limited viewing angle, etc., to achieve the effect of maintaining continuity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
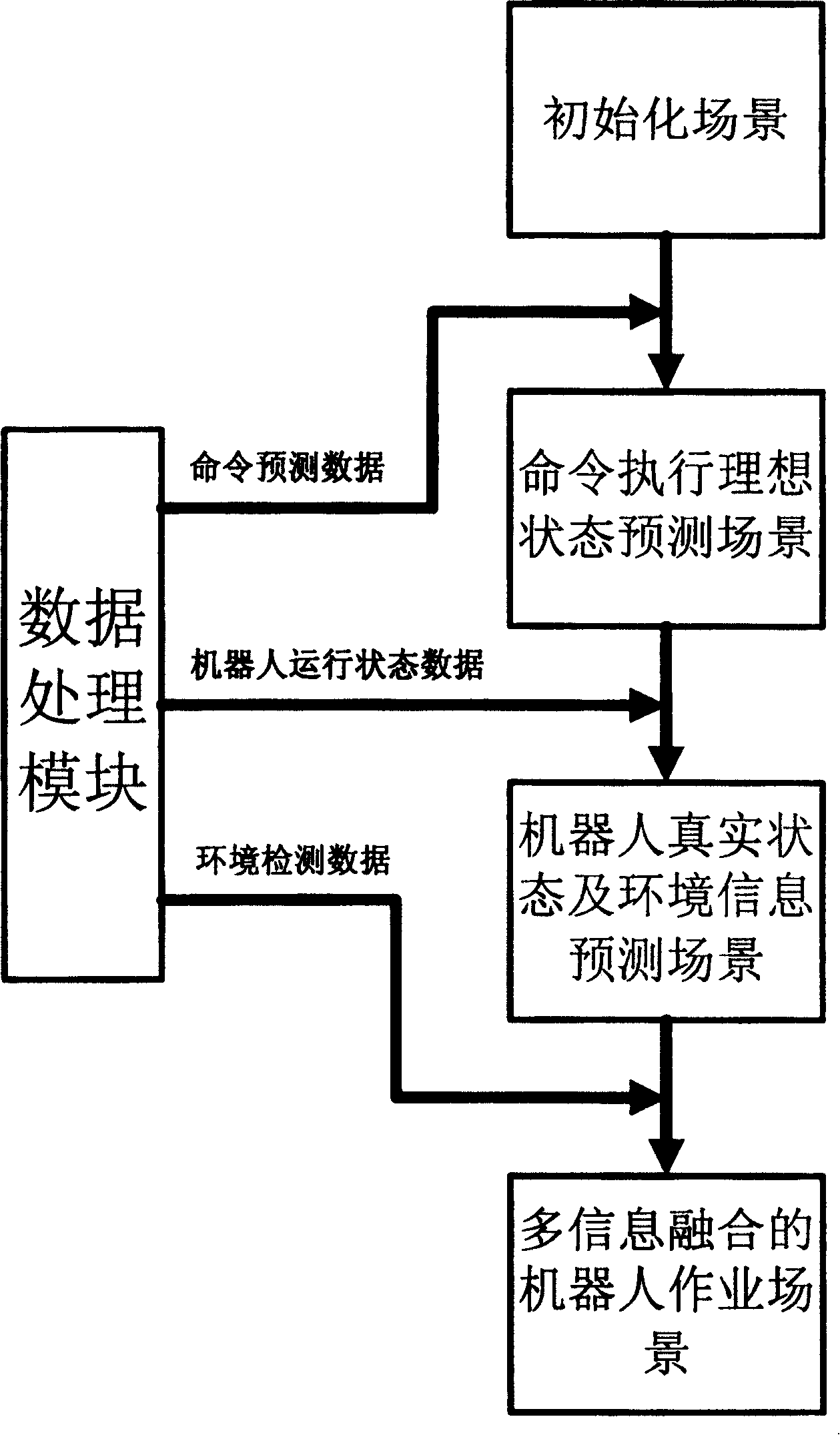
[0026] The working process of the whole humanoid robot working scene is as follows:
[0027] In the first step, the robot starts running and the teleoperation control starts. Start the computer program to display the established scene model. Use the initialization data to determine the initial position of the robot model and its operation target model, and determine the initial angle between the connecting rods of the robot model. What is generated in this step is the initialization interface of the scene.
[0028] In the second step, the scene data processing module receives the operation commands issued by the teleoperator in real time, interprets and generates predicted trajectory data. Use the prediction data to drive each model in the virtual scene to form a three-dimensional virtual scene. The scene generated in this step can show the ideal motion picture of the robot executing the commands issued by the operator.
[0029] In the third step, the sensor of the robot i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More