

Robot propulsion mechanism for blood vessel intervention operation
A technology of interventional surgery and propulsion mechanism, applied in the direction of catheters, etc., can solve the problems of long surgical training time, long operation time, affecting the quality of surgery, etc., and achieve the effect of synchronizing spiral propulsion and detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
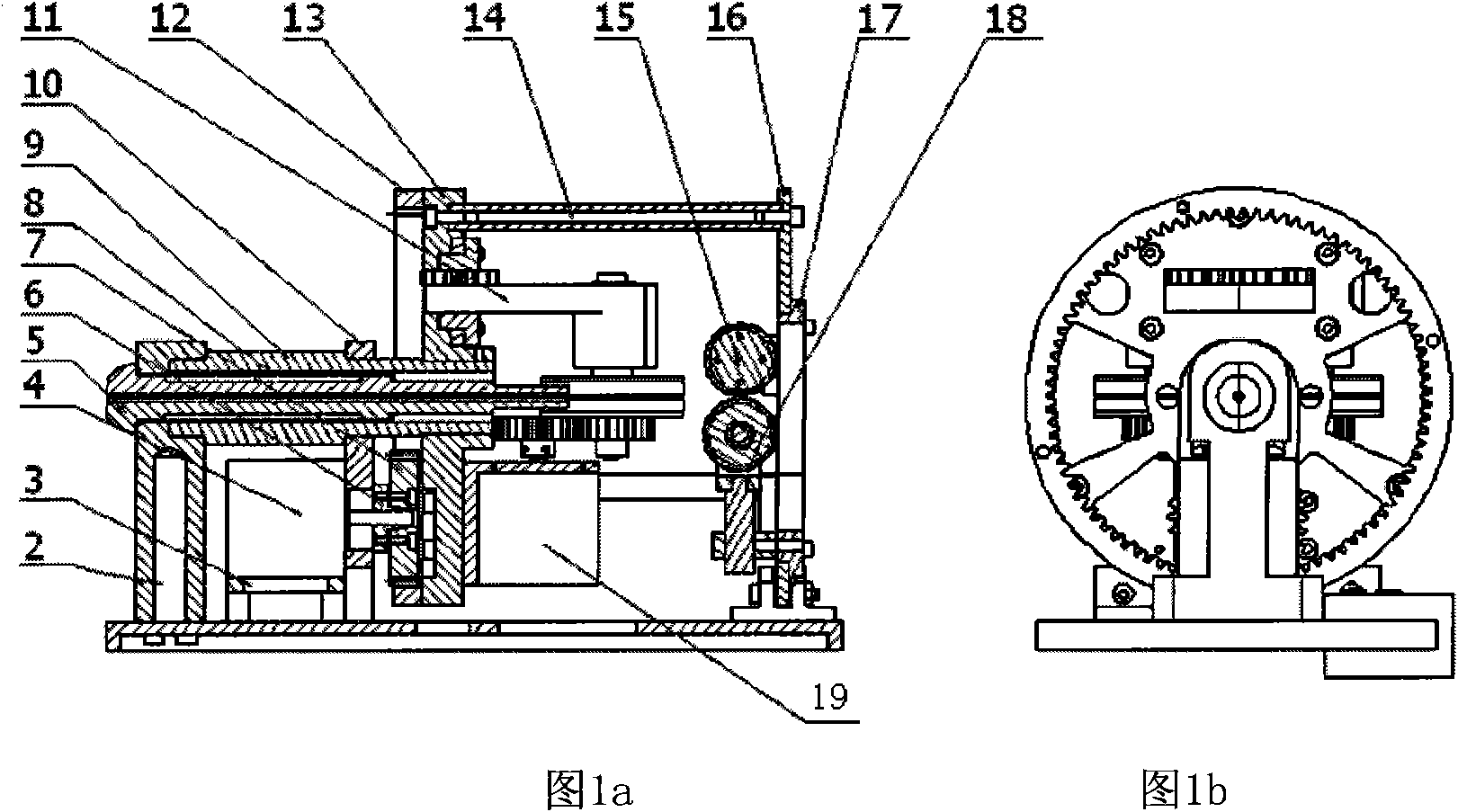
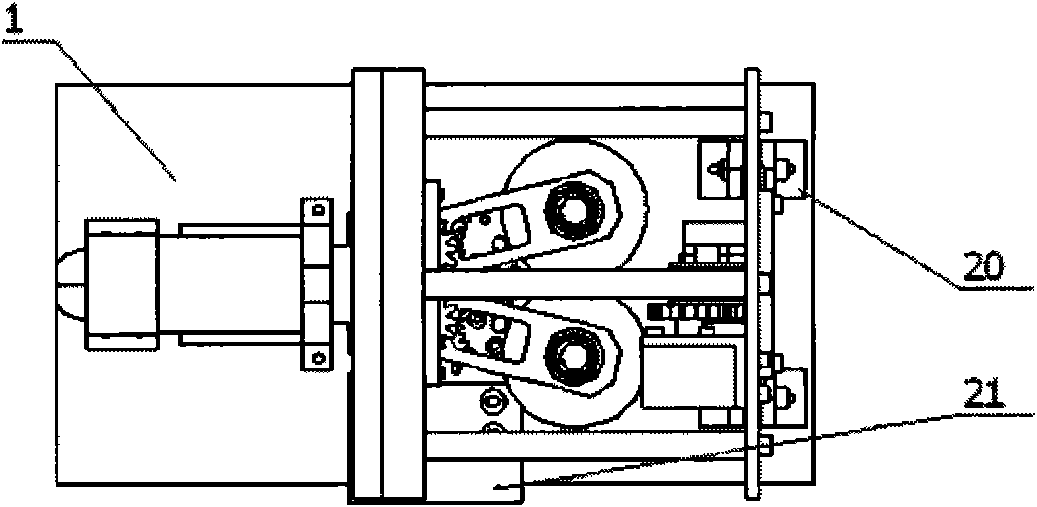
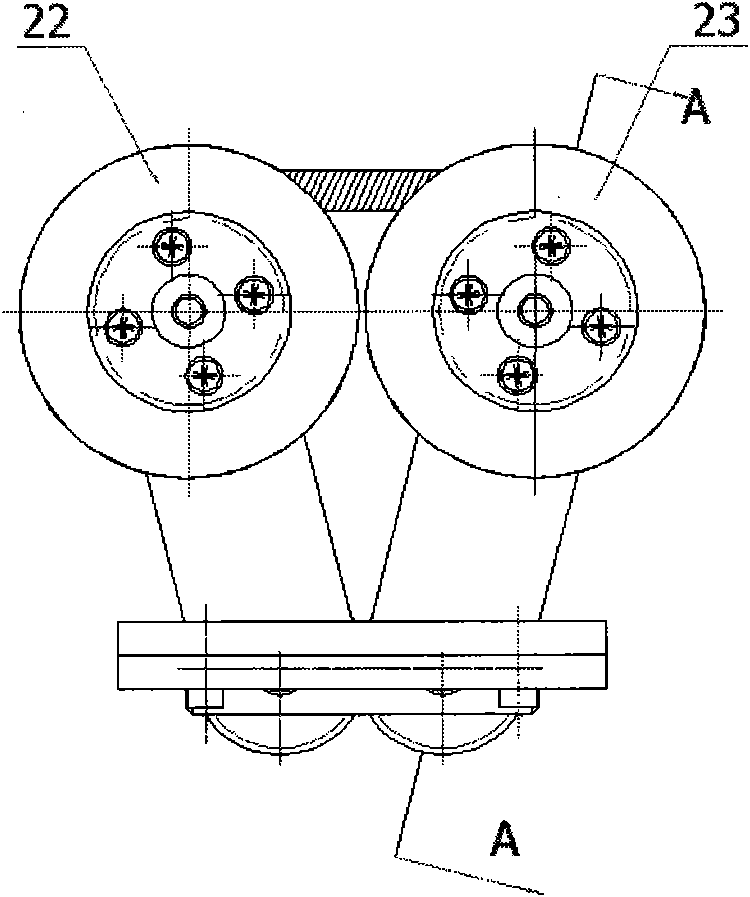
[0017] The preferred embodiment of the propulsion mechanism of the vascular interventional surgery robot of the present invention is an end effector for a vascular interventional surgery robot, which includes an axial feed component for advancing the catheter, a circumferential axis for changing the advancing direction of the catheter Towards a rotating part and a detecting part for detecting the distance advanced by the catheter;
[0018] Among them, the detection part and the axial feed part are connected as a whole through a connecting rod and kept parallel, and the two feed and rotate synchronously; the axial feed part has a pair of synchronous and reverse-rotating active rollers to form a guide for the catheter. The first clamping arm; the detection part includes a pair of driven rollers to form the second clamping arm for the catheter; the double-arm clamping of the catheter is realized, and the purpose of synchronizing the helical advancement and detection of the cathete...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More