

Multi-joint linked multi-finger dexterous hand
A multi-joint, dexterous hand technology, applied in the field of robotics, can solve the problems of high cost, complex control of robot dexterous hands, poor grasping adaptability, etc., and achieve the effect of reducing driving devices, reliable grasping, and simplifying control devices
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The specific embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings.
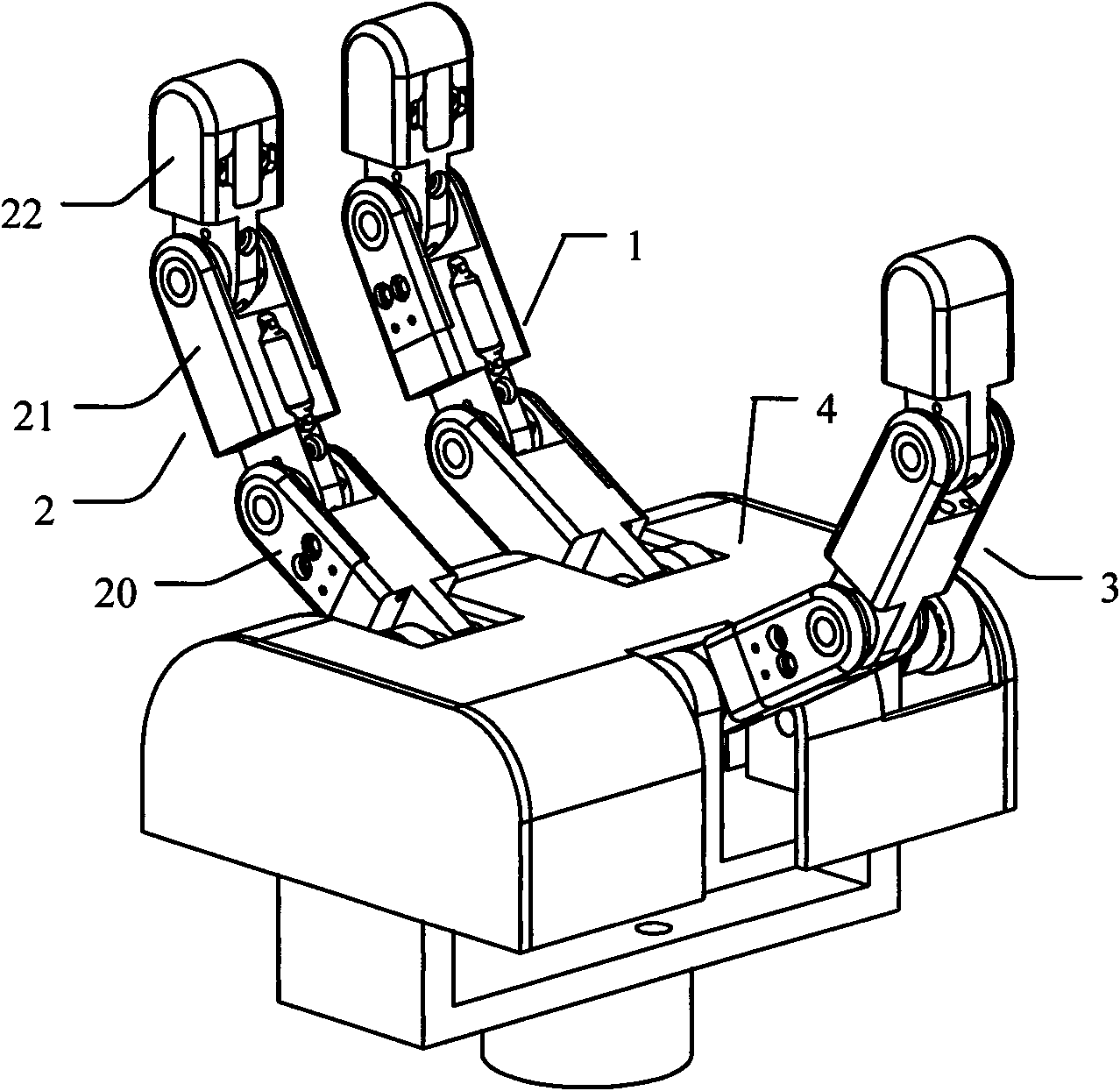
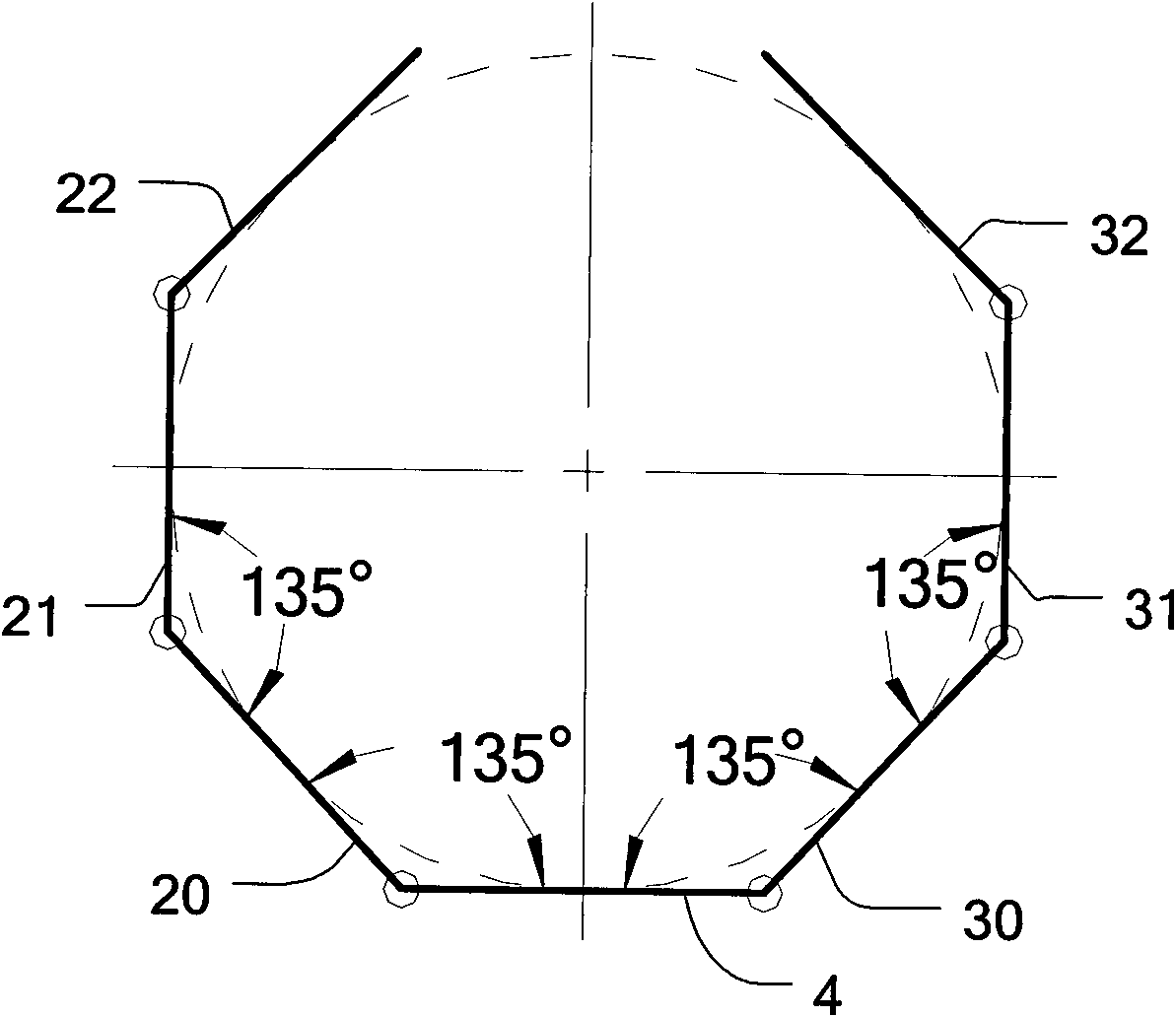
[0028] Such as figure 1 As shown, the present invention takes a multi-joint linkage multi-fingered dexterous hand provided with three fingers and each finger is provided with three joints as an embodiment. Of course, the number of fingers and joints can be changed at any time according to different needs, and The quantities of both are not necessarily the same. That is, the number of fingers can be two, three, four or five, or even more than five; and the number of joints can also be two, three, four, five, six or even more than six. In the present invention, the fingers are distributed on both sides of the palm in a staggered shape, so as to prevent the fingers from colliding with each other when the dexterous hand grips a small object.
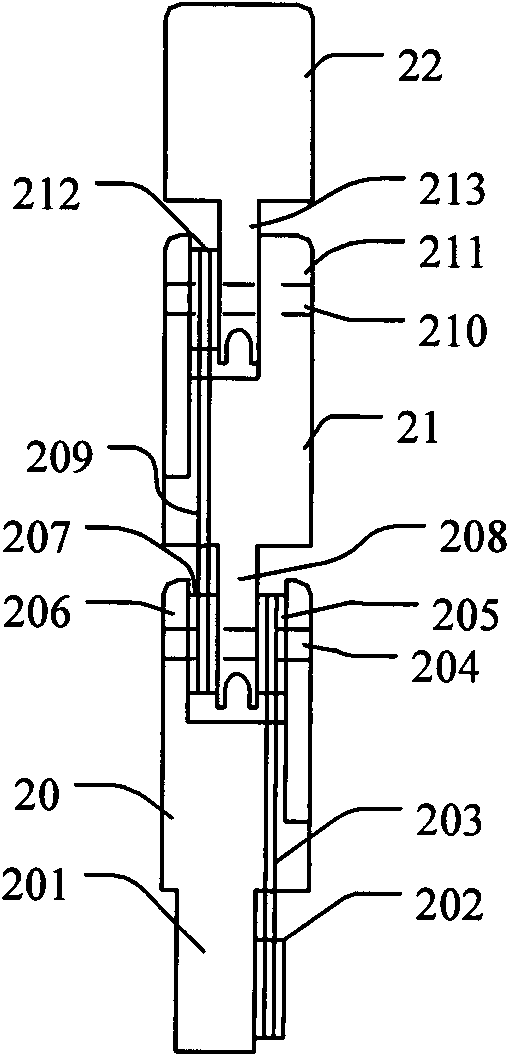
[0029] Such as figure 1 with figure 2 As shown, the multi-joint linkage multi-fingered d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More